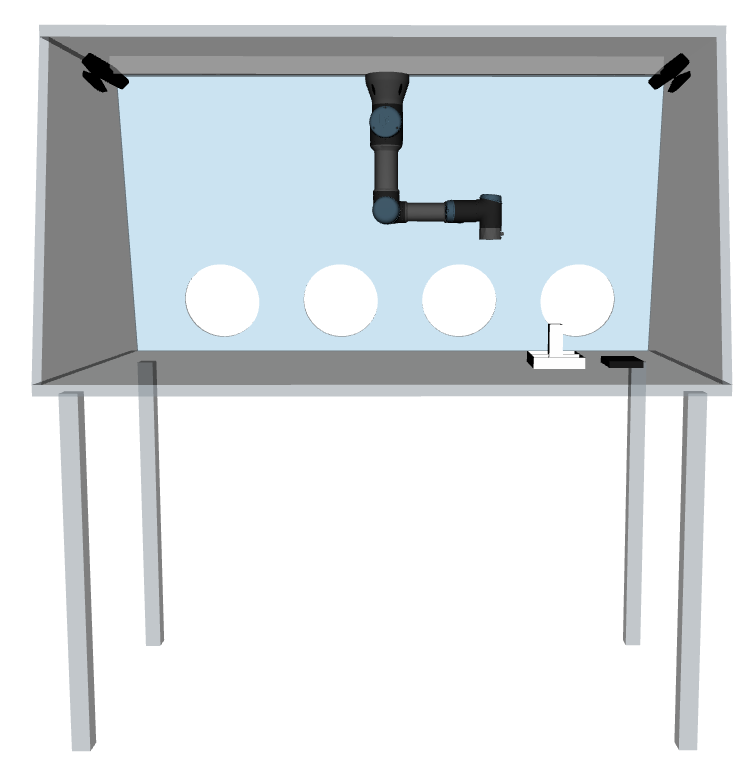
Technicians at LOF handle chemicals elements that needs to be contained in specific environment. To that extent they use glove boxes. The space inside these boxes is constrained and manipulation of objects is not always practicle. To that extent, they want to introduce robots inside the glove boxes to assist the lab technician. A postdoctoral student, Lucas Joseph, has been recruited to build a demonstrator of such technology.
Specifications
In this project the robot has to realise three tasks :
- Bring unreachable tools/vials
- Serve as a 3rd arm to hold tools/vials
- Bring preparation to some device
The project involves :
- Scene detection to detect obstacles and objects of interest
- Manipulation to grab objects of differents size and shapes (vials, tools, … )
- Human robot communication to decide when to move the robot
- Space constraints with a reduced workspace inside the glovebox and potentially multiple obstacles
Robot control scheme
The whole robot control scheme can be summarize as follow:
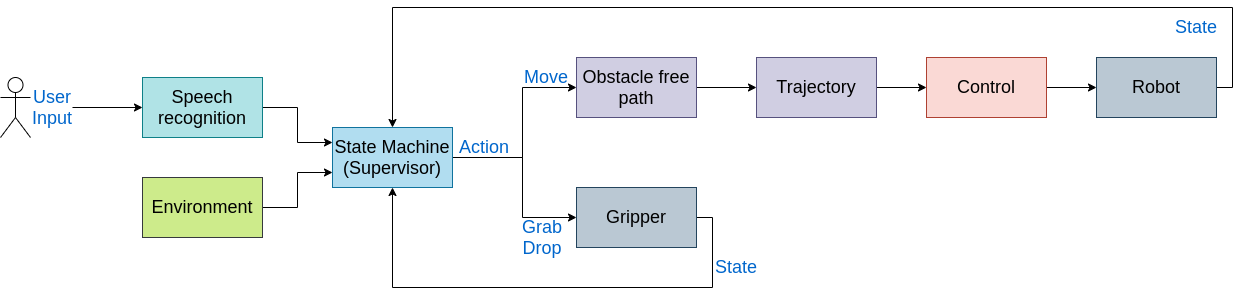
Specific development has been conducted for each of these blocs.
Development
Speech recognition
The speech recognition is performed using the python speech_recognition package. When a human speaks, the audio is converted to text and analysed to see if it matches some keywords. Actions are then triggered to match the desired command.
Environment
Then environment is observer using a kinect 2.
Obstacle detection
Obstacle detection is performed using the iai_kinect2 and moveit packages.
Object of interest detection
Objects of interest are detecte using Apriltags.
State machine
In this project the state machine is kept very simple since the robot as few task to do.
Obstacle free trajectory
The trajectory are compute using Moveit. The resulting trajectory is then send to our control using our package moveit_trajectory_interface
Control
The control part is performed using our state of the art control algorithm panda_qp_control. It uses velocity_qp for the Quadratic Programming algorithm formulation.
Videos
Here are some videos of the project.
Demonstration on a real robot
Here is a video of the demonstrator in action. The robot realises three tasks:
- Bring unreachable tools/vials
- Serve as a 3rd arm to hold tools/vials
- Bring preparation to some device
Simulation
The demonstrator is also working in simulation with gazebo. The physics of the experiment is respected and the tray can be grabed and moved around.
In the following video, we also simulated different robot inside a glovebox available on the market. We first insert a panda robot inside the glovebox. It can be seen that the robot is too big for a standard glovebox. Secondly, we test it with a UR3 robot. While the robot fits inside the glovebox, its range of motion is too small to reach the whole workspace inside the glovebox. The last simulation add a rail on the roof of the glovebox. It is then possible for the robot to go anywhere inside the glovebox workspace
Finally we can also simulate the presence of RGBD cameras inside the glovebox. This video shows that the simulation also displays data from the camera. Depth points and camera stream are displayed and synchronised with the robot motion.
People involved:
- Lucas Joseph
- Vincent Padois
- David Daney
- Pierre Guillot at LOF
Related topics #glovebox

The glovebox project started the 1st of August 2021 and lasted one year. During this year we developped a demonstrator for a robot assisted glovebox.
Live demonstration Here is a video of the demonstrator in action. The robot realises three tasks:
Bring unreachable tools/vials Serve as a 3rd arm to hold tools/vials Bring preparation to some device All this work is done using the softwares developped at Auctus, namely :
panda_qp_control with velocity_qp moveit_trajectory_interface …
[Read More]
Solvay is a Belgian multinational chemical company established in 1863. Following its integration with Rhodia, the Committee of Executive Members at Solvay reorganised its various business units into five segments – Consumer Chemicals, Advanced Materials, Performance Chemicals, Functional Polymers and Corporate & Business Services
Since 2020, we have developed a long term collaboration with the chemical company Solvay in order to help them in the digitalization and robotization of their …
[Read More]
Me I am currently an engineer for the experimentation and development for research department (Service d’Expérimentation et de Développement SED) and mainly working on the Auctus robotic plateform.
I did a Postdoc from 2021 to 2022 at the joint lab between CNRS and Solvay called the Laboratory Of the Future. This Postdoc was conducted in collaboration with the Auctus team. The goal of this project was to introduce a robotic assistant inside a glovebox. To know more about this project you can go …
[Read More]