Positioning and Objectives The Inria Center at the University of Bordeaux hosts various research teams that incorporate robots into their projects (e.g. Auctus team or Manao team). The Experimental and Development Service (SED) is responsible for establishing and maintaining the experimental platforms of the center, including the maintenance of its robots. These robots operate within ecosystems that encompass various sensors such as cameras and lasers, and they are controlled using the ROS middleware.
[Read More]
The Auctus team was asked to perform a demonstration of our work during the Village Sports & Science in Bordeaux. We used the same demonstration that we did during the robotcup to over 2300 visitors.
Context Recent progresses in robotics, which tend toward assistive systems or versatile collaborative robots, could make a reorganization of industrial sites possible in order to preserve the health of human workers, by improving their working conditions, while enhancing the value of human expertise and skills. Such a transformation of work requires to rethink robotic control approaches, both in terms of safety and physical capabilities, to enable the robots to help humans in their activity and evolve in a shared environment.
[Read More]
The Auctus team manned a demonstration stand at the robocup. We took advantage of this opportunity to test our MPC based algorithms in a playful experience.
Players were given small balls to throw into the large Plexiglas basket at the foot of the robot. The robot must prevent the marble from falling into the basket. To do this, he’s equipped with a tiny landing net.
Behind this seemingly simple game runs an algorithm to detect the ball’s landing point, as well as our real-time MPC algorithm to move the robot, taking full account of the robot’s capabilities.
[Read More]

Paper Abstract Robots require the ability to autonomously and continuously react to unexpected online changes in the task definition and in the environment, especially those cohabited with humans. To react to these changes, the task, from the current state up to the finish, must instantly be reconsidered. This implies a prohibitive re-computation cost.
This paper proposes a modular control architecture based on Model Predictive Control, that offers a good compromise between optimally achieving the task and the required computation time, by only reconsidering the near future.
[Read More]

Paper Abstract Efficient workspace sharing of collaborative robots and human operators remains an unsolved problem in the industry. This problem goes beyond the use of a priori or a posteriori safety measures and has to be tackled at the control level. To address the need of adaptation to human presence as well as to endow the robot with the ability to adapt interactively to new Cartesian targets, a linear Model Predictive Controller is proposed in this paper.
[Read More]

The glovebox project started the 1st of August 2021 and lasted one year. During this year we developped a demonstrator for a robot assisted glovebox.
Live demonstration Here is a video of the demonstrator in action. The robot realises three tasks:
Bring unreachable tools/vials Serve as a 3rd arm to hold tools/vials Bring preparation to some device All this work is done using the softwares developped at Auctus, namely :
[Read More]
Solvay is a Belgian multinational chemical company established in 1863. Following its integration with Rhodia, the Committee of Executive Members at Solvay reorganised its various business units into five segments – Consumer Chemicals, Advanced Materials, Performance Chemicals, Functional Polymers and Corporate & Business Services
[Read More]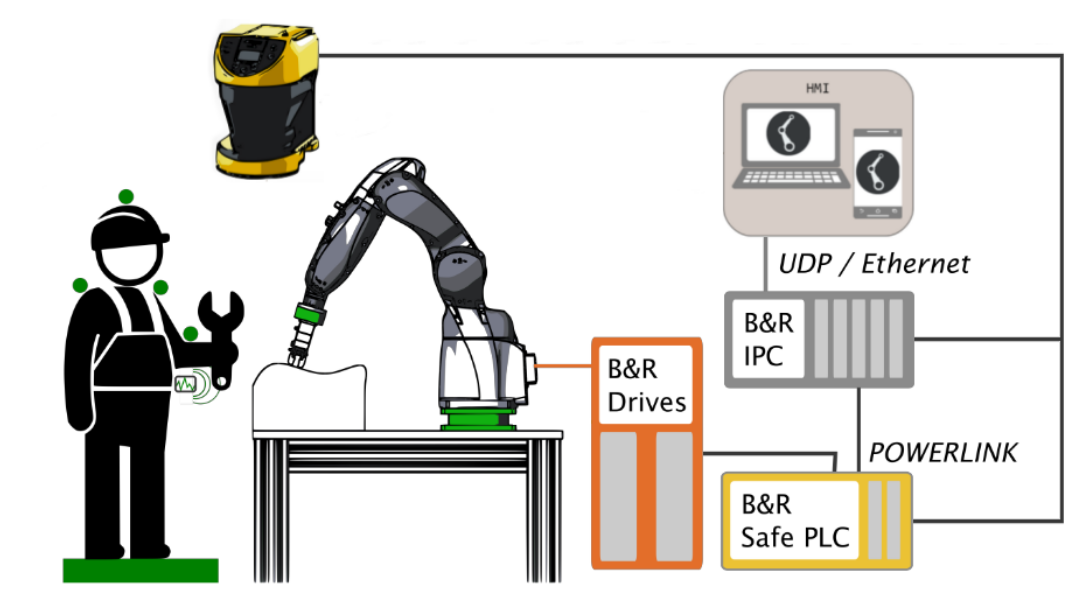
Harry2 project overview
The objective of the HARRY2 project is to attain more advanced workspace sharing capabilities through fully exploiting the collaborative possibilities defined by ISO TS 15066. This is achieved by:
Developing PLC software and motion controllers using robot-agnostic industrially-rated components to ease and standardize the development of safe robotic applications with workspace sharing. Integrating state-of-the-art energy-based control algorithms using these industrial hardware components, so that safety is no longer treated as an exception but considered as a constraint when computing the control solution in real-time.
[Read More]
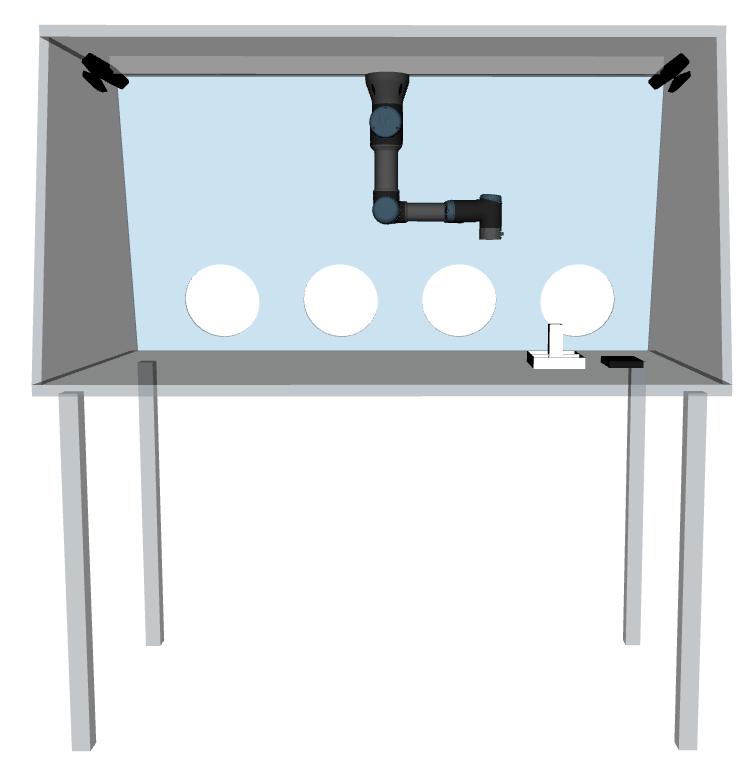
Technicians at LOF handle chemicals elements that needs to be contained in specific environment. To that extent they use glove boxes. The space inside these boxes is constrained and manipulation of objects is not always practicle. To that extent, they want to introduce robots inside the glove boxes to assist the lab technician. A postdoctoral student, Lucas Joseph, has been recruited to build a demonstrator of such technology.
Specifications In this project the robot has to realise three tasks :
[Read More]