The SHAARE associate team is created in 2024 between the IRiS lab at KAIST and the Auctus team at Inria, to share our complementary methodological orientations in haptic shared control. Together, we aim at developing shared-control approaches that, either, better guide the human through adaptive haptic guidance, or adjust the robot behavior according to the human gestures.
The IRiS lab develops virtual-fixture feedback, generated from a task description given by the user.
[Read More]
This collaborative project started in 2021 between the AUCTUS team at Inria, the RoBioSS team at the Pprime Institute (CNRS), and the Interaction team at the CeRCA laboratory (CNRS). It is co-funded by the ASAP-HRC young-researcher ANR grant and the Perception-HRI Nouvelle-Aquitaine Regional Aid. It aims at rethinking Autonomy for Shared Action and Perception in Human-Robot Collaboration, through transverse studies in robotics and cognitive sciences.
Three scientific axes are studied to develop a human-centered and generic shared-autonomy framework:
[Read More]

The MOVER project is related to the study of morphological and motor variability of a human operator. Its goal is to develop tools for representing different operators with varying morphologies, mouvement amplitudes and motor variability for ergonomics purposes.
Motor variability : an appropriate level of motor variability can contribute to lower the incidence of musculoskeletal disorder of a human operator. In this framework, the aim of the project is to get a better insight into the motor variability of a human operator through different experimental protocols.
[Read More]

The PacBot project aims to design a semi-autonomous cobotic system for assistance, capable of selecting, synchronising and coordinating tasks distributed between the human and the robot by adapting to different types of variability in professional gestures, while anticipating dangerous situations.
The orchestration of tasks between the human and the robot is difficult because it must answer the question of the distribution of roles within the couple according to the physical and decision-making abilities and constraints as well as the consequences of their interactions.
[Read More]

This ADT (Aide au Développement Technologique) aims to give a technical support for experimental developpement of all Auctus research activities. These technological developments are essentially software developments in the context of capturing human movement and about real-time control of collaborative robots.
The objectives of the ADT come under development, deployment, documentation and support of a software architecture for experimentation in collaborative robotics allowing the short, medium and long term development of the scientific work of Auctus and facilitating their dissemination.
[Read More]
Jessica Colombel, PhD student, works here on human motion capture.
Assistance or collaborative robots aim to preserve the health and well-being of people, in particular by promoting interactions during phases of fragility. There are many ways to interact with robots, but this project only focus on human motion. The goal of the BioMotion project is to find the modalities of representation of movement allowing to extract physical and cognitive information.
[Read More]
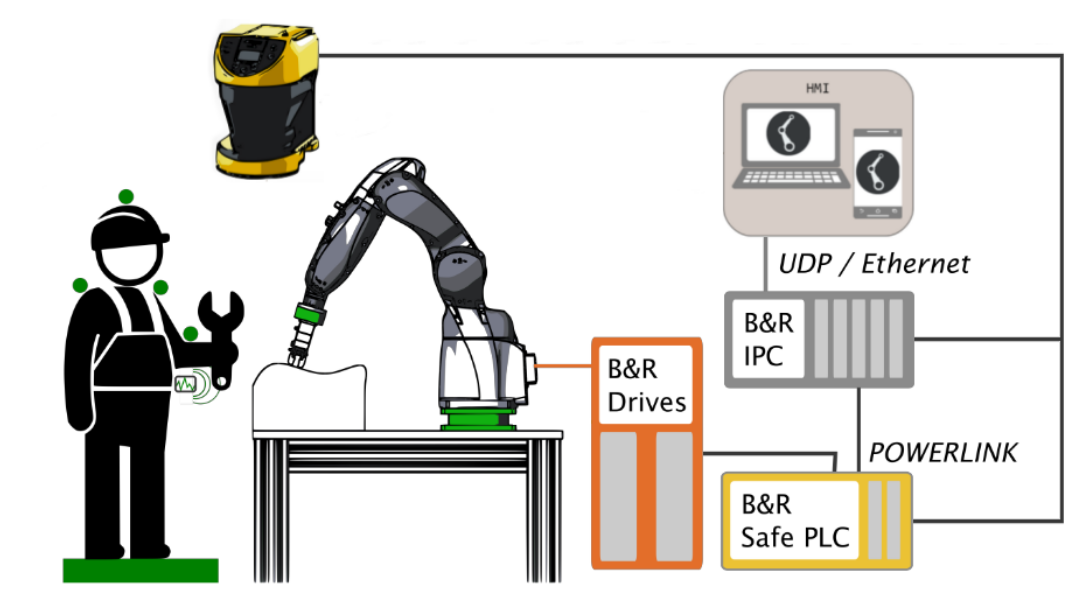
Harry2 project overview
The objective of the HARRY2 project is to attain more advanced workspace sharing capabilities through fully exploiting the collaborative possibilities defined by ISO TS 15066. This is achieved by:
Developing PLC software and motion controllers using robot-agnostic industrially-rated components to ease and standardize the development of safe robotic applications with workspace sharing. Integrating state-of-the-art energy-based control algorithms using these industrial hardware components, so that safety is no longer treated as an exception but considered as a constraint when computing the control solution in real-time.
[Read More]
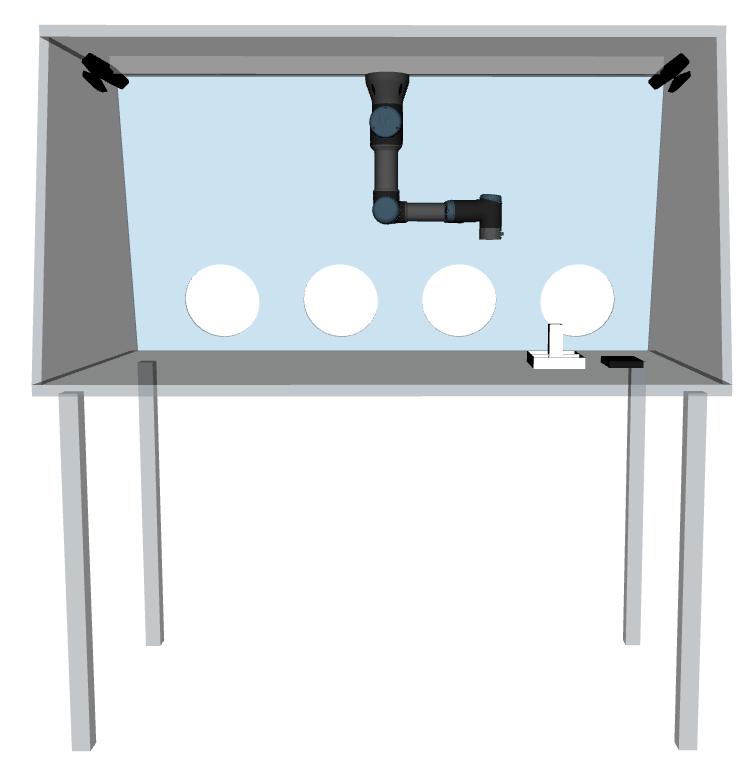
Technicians at LOF handle chemicals elements that needs to be contained in specific environment. To that extent they use glove boxes. The space inside these boxes is constrained and manipulation of objects is not always practicle. To that extent, they want to introduce robots inside the glove boxes to assist the lab technician. A postdoctoral student, Lucas Joseph, has been recruited to build a demonstrator of such technology.
Specifications In this project the robot has to realise three tasks :
[Read More]
The LiChIE project (funded by BPI) aims to design a constellation of mini-satellites for optical Earth observation. Among many other topics, this requires to rethink the way sattelites are being produced in order to ease this highly complex process. There is actually an unprecedented economical and societal demand for robots that can be used both as advanced and easily programmable tools for automatizing complex industrial operations in contexts where human expertise is a key factor to success and as assistive devices for alleviating the physical and cognitive stress induced by such industrial task.
[Read More]
The Portage project aims at developing robotic solutions to support moving heavy structures within industrial environments. Typically, the targeted task is supporting moving an aircraft wing throughout the successive workstations in the industrial facilities. A robotic collaborative plateform is designed, developed and evaluated to increase both productivity and safety for industrial operators.
The contribution from Auctus regards the overall approach for designing the robotic plateform, developing human-robot interfaces, and experimentaly evaluate its impact.
[Read More]