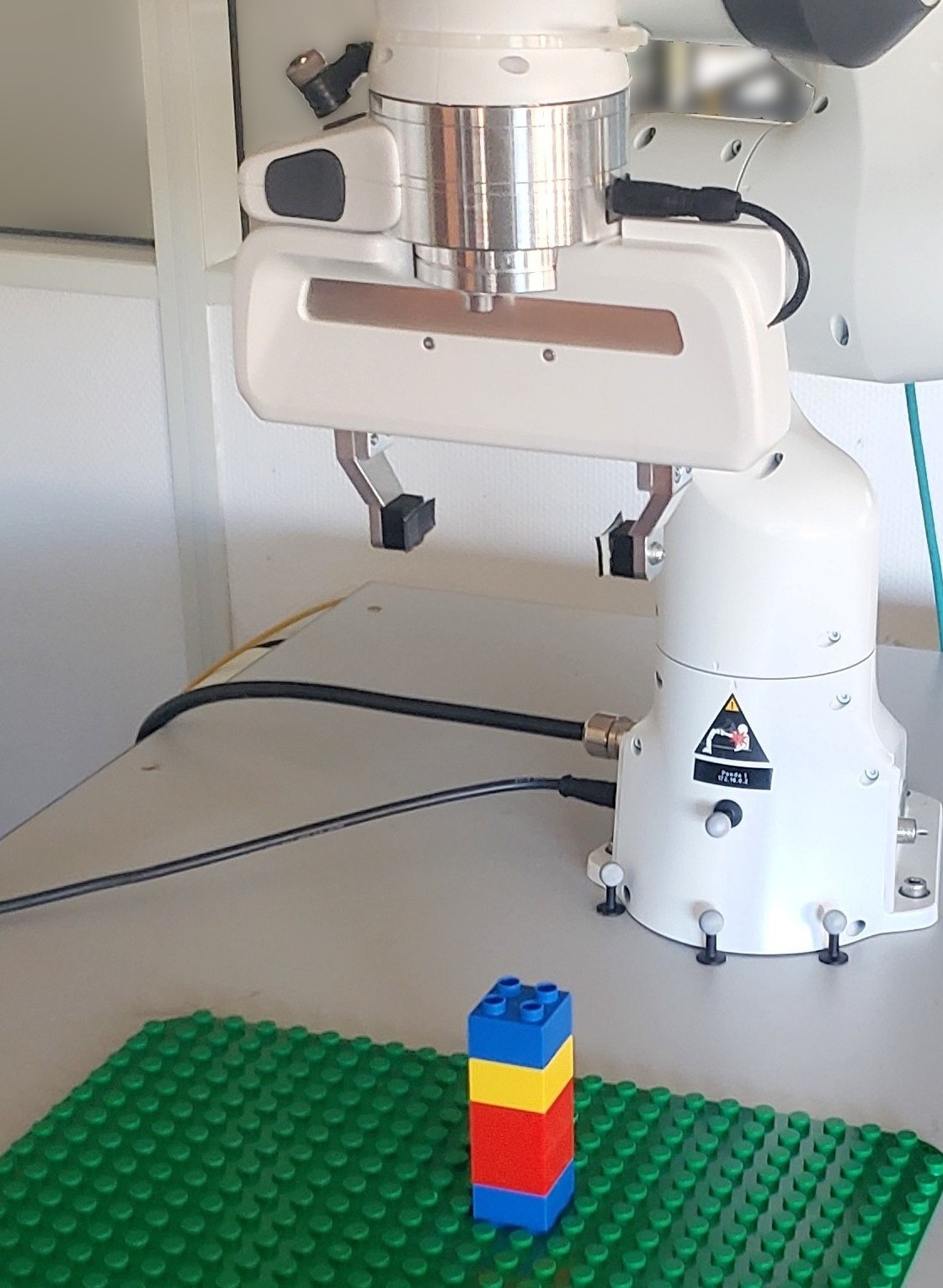
The aim of this project is to use pieces of softwares developed at Auctus to manipulate LEGO. This work can be related to experiments for Benjamin Camblor’s thesis and the PacBot project.
Live demonstration Here is a video of a manipulation demo. The robot realizes three tasks:
Remove a single LEGO on a tower Put LEGO on the plate Put LEGO on another LEGO All this work is done using the softwares developed at Auctus, namely :
[Read More]

The glovebox project started the 1st of August 2021 and lasted one year. During this year we developped a demonstrator for a robot assisted glovebox.
Live demonstration Here is a video of the demonstrator in action. The robot realises three tasks:
Bring unreachable tools/vials Serve as a 3rd arm to hold tools/vials Bring preparation to some device All this work is done using the softwares developped at Auctus, namely :
[Read More]
PhD title: Shared Situational Awareness for task planning between a human and a robot
[Read More]
Me I am a PhD student carrying out a thesis resulting from a collaboration between the Solvay company and the Auctus team.
I started my thesis in the Auctus team in September 2021. I worked as a software development engineer in the team between 2020 and 2021. In 2020, I graduated as a robotic engineer from the engineering school ENSTA Bretagne, and I also validated the Master Dynamics and Signals System proposed by the University of Angers.
[Read More]
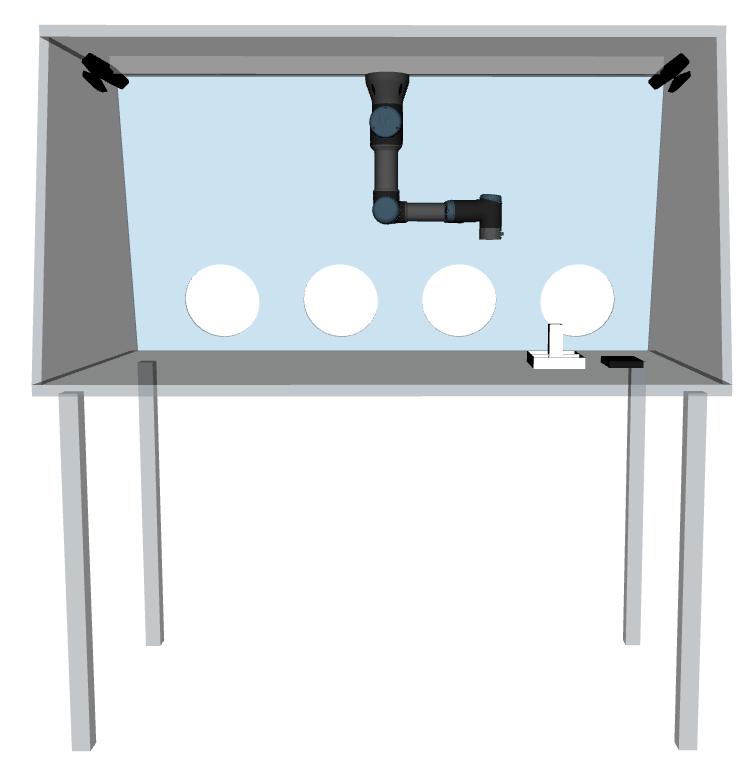
Technicians at LOF handle chemicals elements that needs to be contained in specific environment. To that extent they use glove boxes. The space inside these boxes is constrained and manipulation of objects is not always practicle. To that extent, they want to introduce robots inside the glove boxes to assist the lab technician. A postdoctoral student, Lucas Joseph, has been recruited to build a demonstrator of such technology.
Specifications In this project the robot has to realise three tasks :
[Read More]
Me I am currently an engineer for the experimentation and development for research department (Service d’Expérimentation et de Développement SED) and mainly working on the Auctus robotic plateform.
I did a Postdoc from 2021 to 2022 at the joint lab between CNRS and Solvay called the Laboratory Of the Future. This Postdoc was conducted in collaboration with the Auctus team. The goal of this project was to introduce a robotic assistant inside a glovebox.
[Read More]

My publications This is list fo my publications
Journal articles 24 documents Conference papers 24 documents Preprints 24 documents Thesis 24 documents Reports 24 documents Book chapters 24 documents Patents 24 documents Related topics #nrezzoug An iterative Convex Hull Method On-line feasible wrench polytope evaluation based on human musculoskeletal models Posted on March 7, 2022 | Auctus Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$ This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models.
[Read More]