The SHAARE associate team is created in 2024 between the IRiS lab at KAIST and the Auctus team at Inria, to share our complementary methodological orientations in haptic shared control. Together, we aim at developing shared-control approaches that, either, better guide the human through adaptive haptic guidance, or adjust the robot behavior according to the human gestures.
The IRiS lab develops virtual-fixture feedback, generated from a task description given by the user.
[Read More]

Paper Abstract Robots require the ability to autonomously and continuously react to unexpected online changes in the task definition and in the environment, especially those cohabited with humans. To react to these changes, the task, from the current state up to the finish, must instantly be reconsidered. This implies a prohibitive re-computation cost.
This paper proposes a modular control architecture based on Model Predictive Control, that offers a good compromise between optimally achieving the task and the required computation time, by only reconsidering the near future.
[Read More]
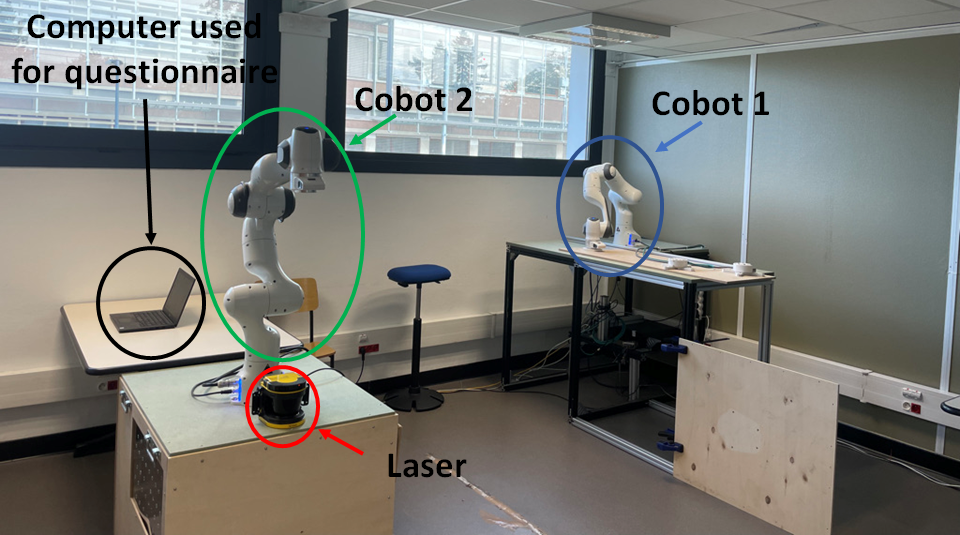
Contexte Dans le cadre des tâches de télérobotique et de collaboration homme-robot, il est essentiel de connaître à tout moment la position des objets dans l’environnement du robot. Cela peut être réalisé à l’aide de divers capteurs : parmi ceux-ci, les systèmes de motion capture constituent une option intéressante.
Figure 1. Représentation d'un système de motion capture
Ces systèmes correspondent à un ensemble de caméras infrarouges, capables de déterminer les poses 3D de corps rigides à haute fréquence.
[Read More]

Paper Abstract Efficient workspace sharing of collaborative robots and human operators remains an unsolved problem in the industry. This problem goes beyond the use of a priori or a posteriori safety measures and has to be tackled at the control level. To address the need of adaptation to human presence as well as to endow the robot with the ability to adapt interactively to new Cartesian targets, a linear Model Predictive Controller is proposed in this paper.
[Read More]
Reachable space of robotic manipulators has complex geometry and is often hard to characterise, therefore it is usually calculated in advance by the robot manufacturers and given as an image in their datasheets (as shown on the image on the right). However these images are hard to exploit as they are not analytical solutions to this problem. Even if we would have an analytical solution to this problem it would still not include in its consideration robot’s dynamics, its payload or its actuator torque limits.
[Read More]
A propos du centre ou de la direction fonctionnelle Le centre Inria Bordeaux - Sud-Ouest est un des neuf centres d’Inria et compte une vingtaine d’équipes de recherche. Le centre Inria est un acteur majeur et reconnu dans le domaine des sciences numériques. Il est au cœur d’un riche écosystème de R&D et d’innovation : PME fortement innovantes, grands groupes industriels, pôles de compétitivité, acteurs de la recherche et de l’enseignement supérieur, laboratoires d’excellence, institut de recherche technologique…
[Read More]
Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$
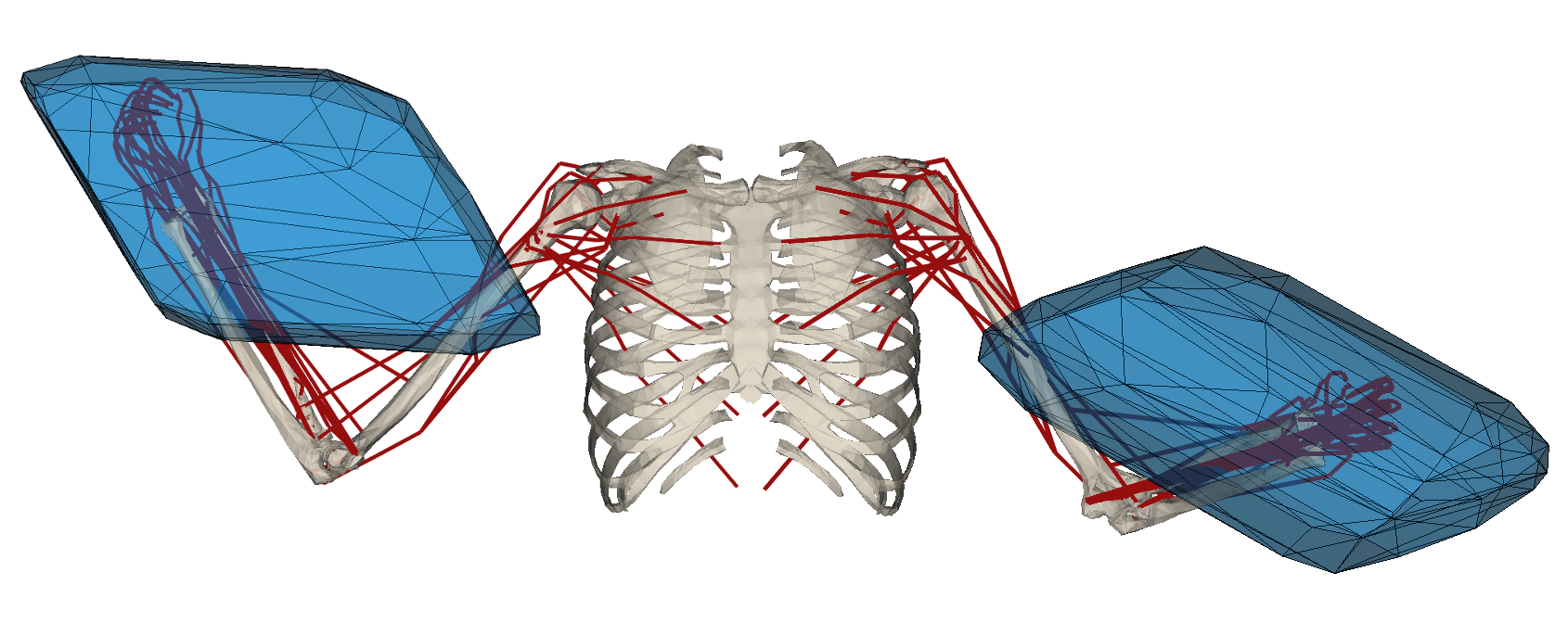
This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models. In this paper the method overview is given as well as the verified on the assistive robotics scenario.
[Read More]

The MOVER project is related to the study of morphological and motor variability of a human operator. Its goal is to develop tools for representing different operators with varying morphologies, mouvement amplitudes and motor variability for ergonomics purposes.
Motor variability : an appropriate level of motor variability can contribute to lower the incidence of musculoskeletal disorder of a human operator. In this framework, the aim of the project is to get a better insight into the motor variability of a human operator through different experimental protocols.
[Read More]
Paper Abstract In this paper, the concept of signaling motions of a robot interacting with a human is presented. These motions consist in using the redundant degrees of freedom of a robot performing a task as new means of meaningful robot-human communication. They are generated through quasi-static torque control, in consistency with the main robot task. A double within-subject (N=16) study is conducted to evaluate the effects of two signaling motions on the performance of a task by participants and on their behavior towards the robot.
[Read More]
The Auctus team focuses on developing the robot control and analysis techniques suitable for human-robot physical interaction, taking in consideration the true limitations/capabilities of the robot and its human counterpart. In order to gather real-time knowledge about the human’s capabilities it is necessary to measure its posture (joint angles, positions,…) in real-time as well. More specifically, in many cases we are only interested in acquiring posture of a specific part of the human body, for example the upper body, or one arm.
[Read More]