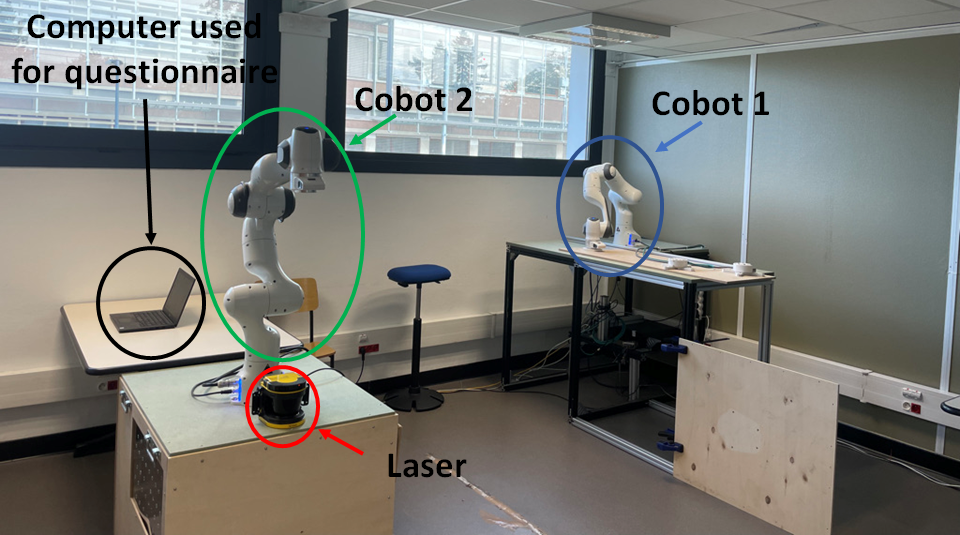
Paper Abstract In this paper, the concept of signaling motions of a robot interacting with a human is presented. These motions consist in using the redundant degrees of freedom of a robot performing a task as new means of meaningful robot-human communication. They are generated through quasi-static torque control, in consistency with the main robot task. A double within-subject (N=16) study is conducted to evaluate the effects of two signaling motions on the performance of a task by participants and on their behavior towards the robot.
[Read More]
Entreprise et responsable industriel de la thèse Farm3, Verrières de Joux (25) & Paris
Romain SCHMITT, Président Farm3, romain.schmitt@farmcube.eu Laboratoires partenaires et encadrement de la thèse Equipe AUCTUS, Inria Bordeaux Sud-Ouest, Talence (33)
David DANEY, Chargé de Recherche Inria, HDR, directeur de l’équipe AUCTUS, david.daney@inria.fr Equipe RoBioSS, Institut Pprime - CNRS, Université de Poitiers (86)
Margot VULLIEZ, Maîtresse de Conférences, équipe RoBioSS, margot.vulliez@univ-poitiers.fr Contexte et objectifs du projet La société Farm3 développe Le Cube, une ferme de culture verticale robotisée et basée sur une technologie innovante à ultrasons (Fig.
[Read More]
The Auctus team focuses on developing the robot control and analysis techniques suitable for human-robot physical interaction, taking in consideration the true limitations/capabilities of the robot and its human counterpart. In order to gather real-time knowledge about the human’s capabilities it is necessary to measure its posture (joint angles, positions,…) in real-time as well. More specifically, in many cases we are only interested in acquiring posture of a specific part of the human body, for example the upper body, or one arm.
[Read More]
Akka Technologies is an engineering and technology consulting group. The group is positioned in all industrial and tertiary sectors of activity, namely aeronautics, automotive, energy, railways, defense, space, information systems and telecommunications.
In 2019-2022, we have established a recurrent collaboration with AKKA to transfer our know-how on collaborative robotics design. Two partnerships have been established.
[Read More]Solvay is a Belgian multinational chemical company established in 1863. Following its integration with Rhodia, the Committee of Executive Members at Solvay reorganised its various business units into five segments – Consumer Chemicals, Advanced Materials, Performance Chemicals, Functional Polymers and Corporate & Business Services
[Read More]Airbus is a European multinational aerospace corporation. Airbus designs, manufactures and sells civil and military aerospace products worldwide and manufactures aircraft in Europe and various countries outside Europe.
The collaboration aims to design a constellation of mini-satellites and one of the challenges is to rethink their production, in particular through robotic assistance of operators. In this project, we have developed a coupled model of human-robot physical capabilities.
[Read More]Stellantis is a multinational automotive manufacturing corporation formed in 2021 on the basis of a 50-50 cross-border merger between the Italian-American conglomerate Fiat Chrysler Automobiles and the French PSA Group. The principal activity of Stellantis is the design, development, manufacture and sale of automobiles.
[Read More]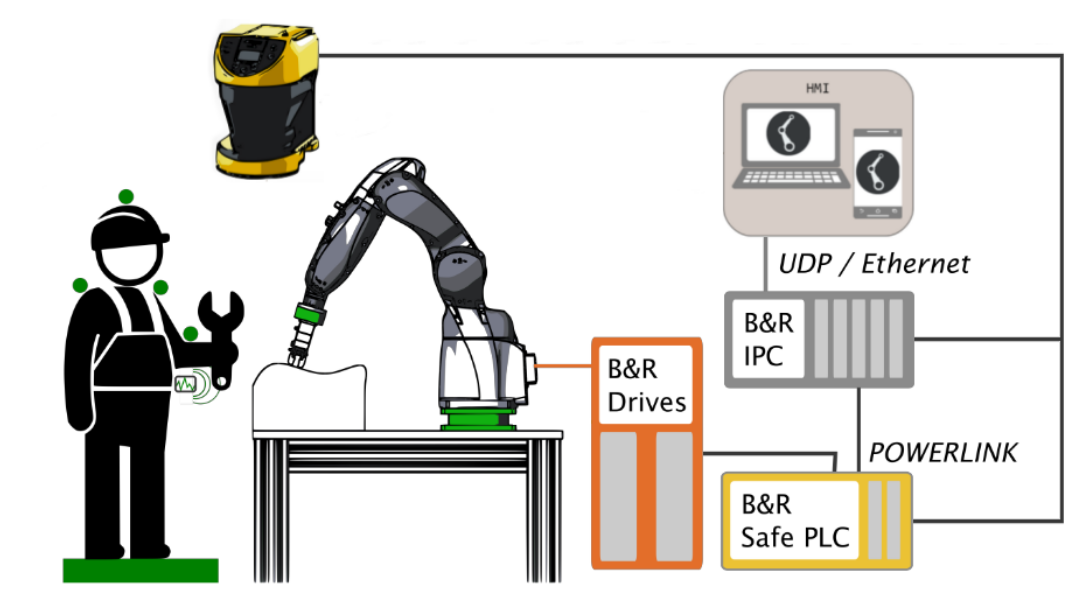
Harry2 project overview
The objective of the HARRY2 project is to attain more advanced workspace sharing capabilities through fully exploiting the collaborative possibilities defined by ISO TS 15066. This is achieved by:
Developing PLC software and motion controllers using robot-agnostic industrially-rated components to ease and standardize the development of safe robotic applications with workspace sharing. Integrating state-of-the-art energy-based control algorithms using these industrial hardware components, so that safety is no longer treated as an exception but considered as a constraint when computing the control solution in real-time.
[Read More]
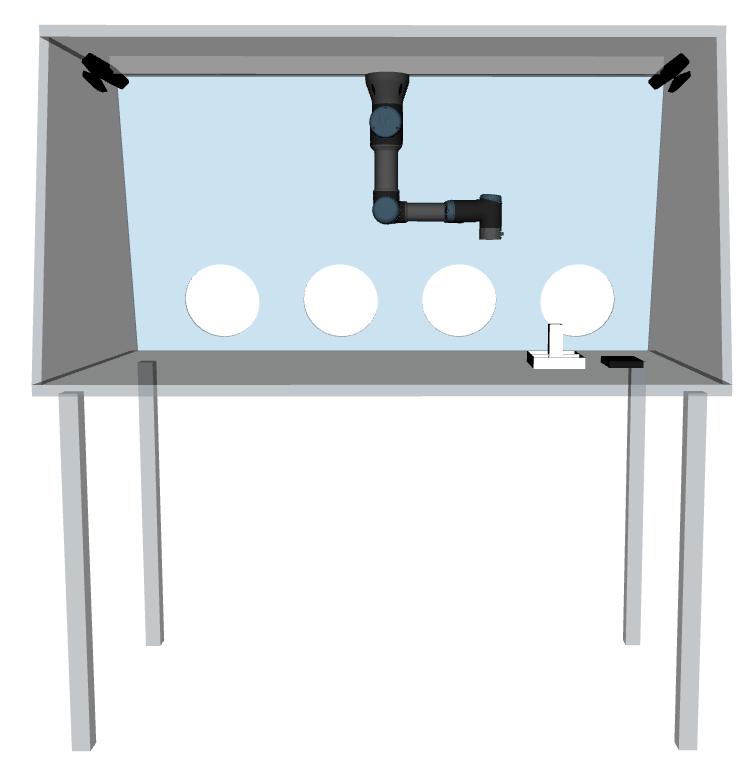
Technicians at LOF handle chemicals elements that needs to be contained in specific environment. To that extent they use glove boxes. The space inside these boxes is constrained and manipulation of objects is not always practicle. To that extent, they want to introduce robots inside the glove boxes to assist the lab technician. A postdoctoral student, Lucas Joseph, has been recruited to build a demonstrator of such technology.
Specifications In this project the robot has to realise three tasks :
[Read More]
The LiChIE project (funded by BPI) aims to design a constellation of mini-satellites for optical Earth observation. Among many other topics, this requires to rethink the way sattelites are being produced in order to ease this highly complex process. There is actually an unprecedented economical and societal demand for robots that can be used both as advanced and easily programmable tools for automatizing complex industrial operations in contexts where human expertise is a key factor to success and as assistive devices for alleviating the physical and cognitive stress induced by such industrial task.
[Read More]