
We were pleased to welcome Sylvie Michel and Emmanuelle Gagnou-Savatier on May, the 2nd 2024 to present their latest results about the emergence of ethical consciousness in robotics research.
We were pleased to welcome Sylvie Michel and Emmanuelle Gagnou-Savatier on May, the 2nd 2024 to present their latest results about the emergence of ethical consciousness in robotics research.

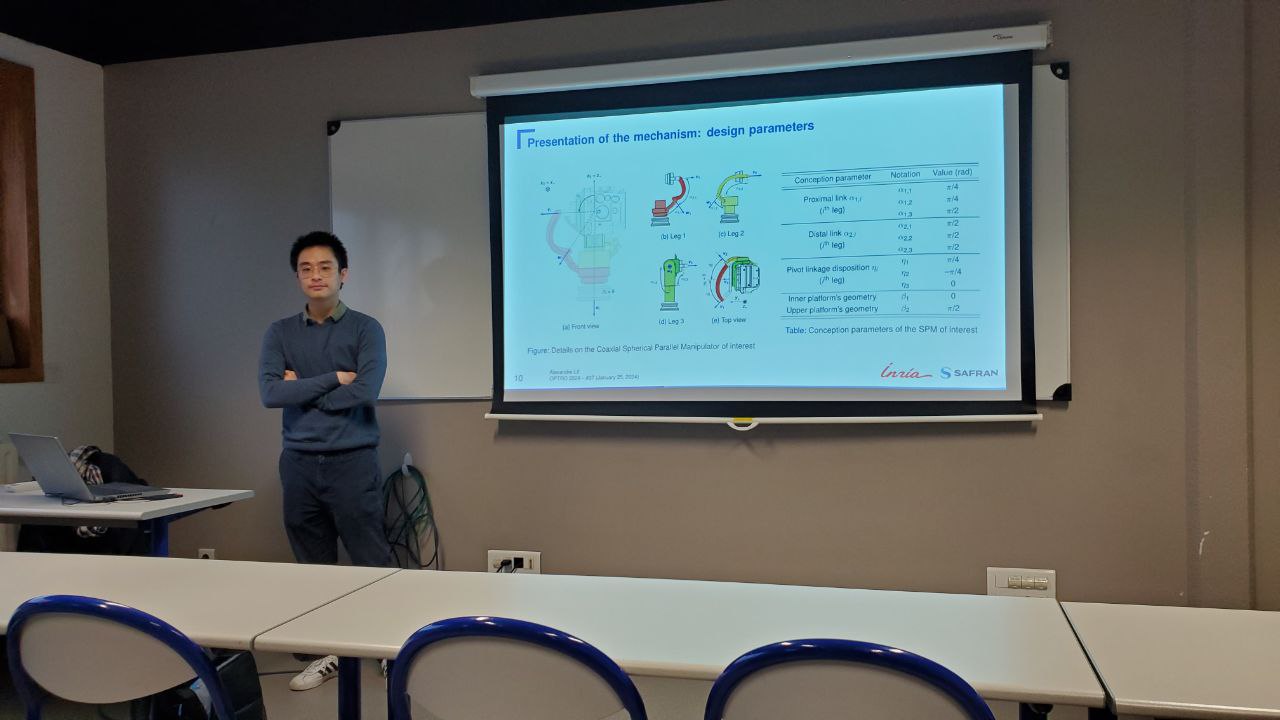
The Auctus team is delighted to receive the visit of Fabrice Rouiller and Alexandre Lê on January 24. Alexandre gave a presentation of his PhD work (CIFRE Safran Electronics & Defense) on the design of parallel robots for inertial stabilization.