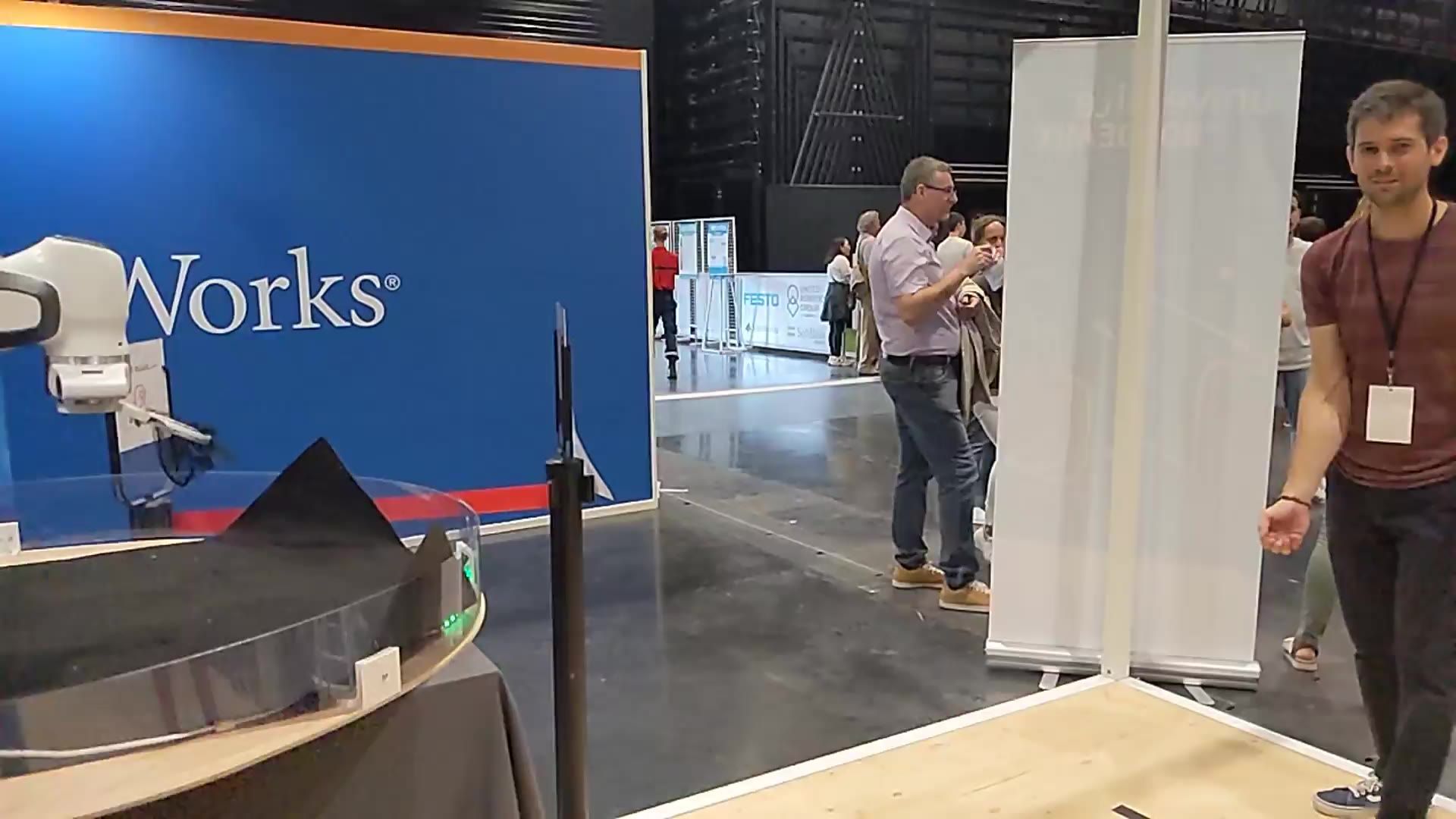
The Auctus team manned a demonstration stand at the robocup. We took advantage of this opportunity to test our MPC based algorithms in a playful experience.
Players were given small balls to throw into the large Plexiglas basket at the foot of the robot. The robot must prevent the marble from falling into the basket. To do this, he’s equipped with a tiny landing net.
Behind this seemingly simple game runs an algorithm to detect the ball’s landing point, as well as our real-time MPC algorithm to move the robot, taking full account of the robot’s capabilities.
[Read More]

Paper Abstract Robots require the ability to autonomously and continuously react to unexpected online changes in the task definition and in the environment, especially those cohabited with humans. To react to these changes, the task, from the current state up to the finish, must instantly be reconsidered. This implies a prohibitive re-computation cost.
This paper proposes a modular control architecture based on Model Predictive Control, that offers a good compromise between optimally achieving the task and the required computation time, by only reconsidering the near future.
[Read More]

Paper Abstract Efficient workspace sharing of collaborative robots and human operators remains an unsolved problem in the industry. This problem goes beyond the use of a priori or a posteriori safety measures and has to be tackled at the control level. To address the need of adaptation to human presence as well as to endow the robot with the ability to adapt interactively to new Cartesian targets, a linear Model Predictive Controller is proposed in this paper.
[Read More]
Abstract Inverse optimal control (IOC) is a framework used in many fields, especially in robotics and human motion analysis. In this context, many methods of resolution have been proposed in the literature. This article presents the Projected Inverse Optimal Control (PIOC), an approach that puts forward a simple and comprehensive view of IOC methods. Especially, we explain how the presence of uncertainties can be properly addressed in our view. Thus, this article highlights how classical methods can be understood as projections of trajectories in the solution space of the underlying Direct Optimal Control (DOC) problem.
[Read More]
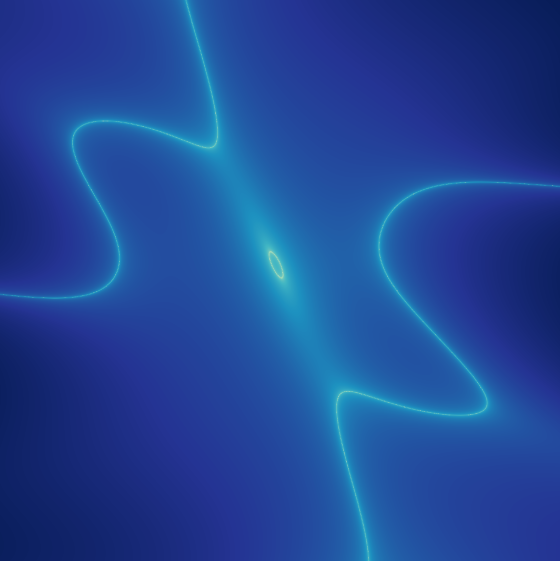
Reachable space of robotic manipulators has complex geometry and is often hard to characterise, therefore it is usually calculated in advance by the robot manufacturers and given as an image in their datasheets (as shown on the image on the right). However these images are hard to exploit as they are not analytical solutions to this problem. Even if we would have an analytical solution to this problem it would still not include in its consideration robot’s dynamics, its payload or its actuator torque limits.
[Read More]
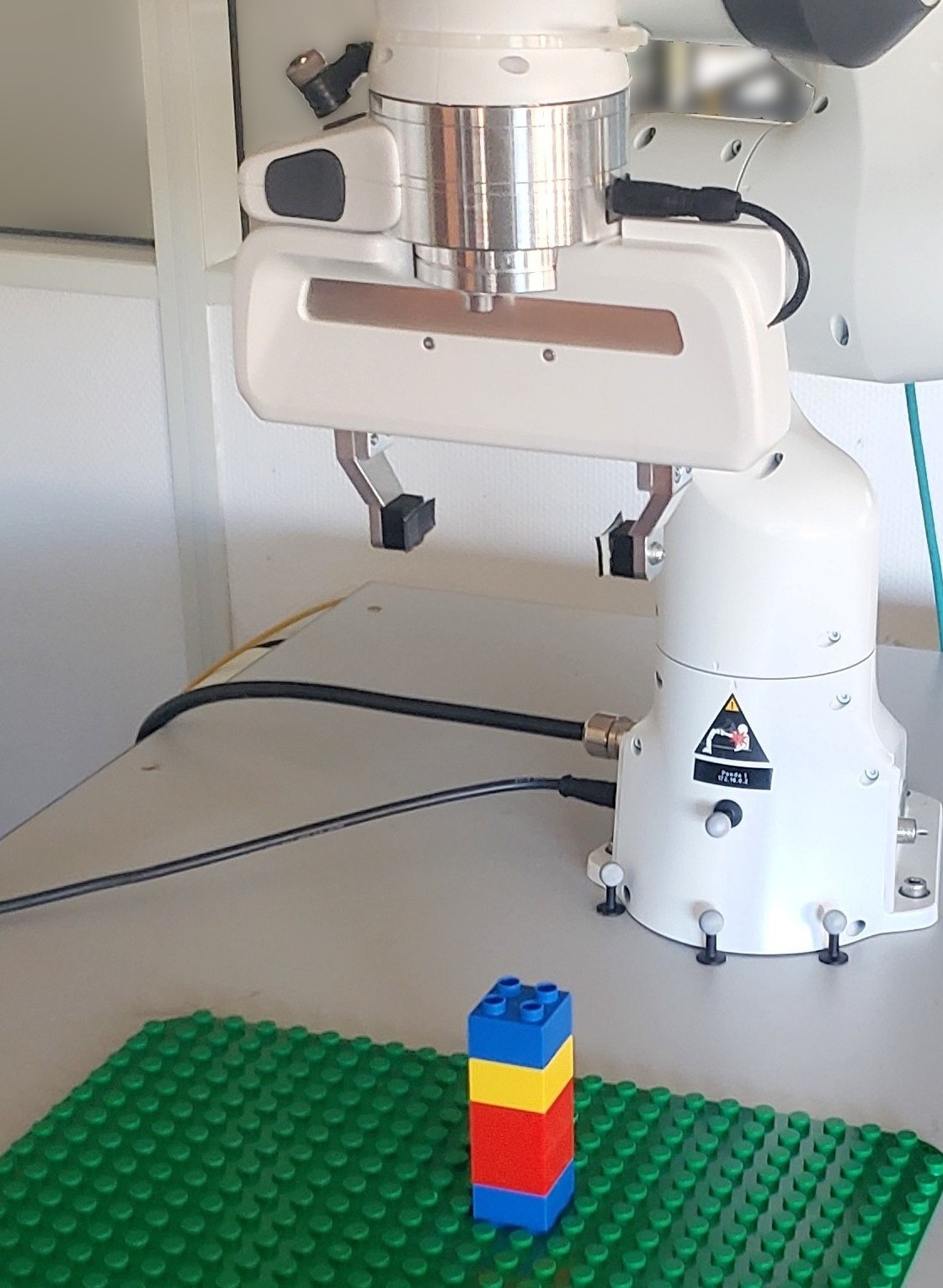
The aim of this project is to use pieces of softwares developed at Auctus to manipulate LEGO. This work can be related to experiments for Benjamin Camblor’s thesis and the PacBot project.
Live demonstration Here is a video of a manipulation demo. The robot realizes three tasks:
Remove a single LEGO on a tower Put LEGO on the plate Put LEGO on another LEGO All this work is done using the softwares developed at Auctus, namely :
[Read More]

The glovebox project started the 1st of August 2021 and lasted one year. During this year we developped a demonstrator for a robot assisted glovebox.
Live demonstration Here is a video of the demonstrator in action. The robot realises three tasks:
Bring unreachable tools/vials Serve as a 3rd arm to hold tools/vials Bring preparation to some device All this work is done using the softwares developped at Auctus, namely :
[Read More]

The internship supervised by Nasser Rezzoug, covered various topics related to robotics and biomechanics, focusing on the identification of the nature and amount of data required to customize the parameters of a musculoskeletal model according to the required precision. A brief summary of the topics discussed and the work carried out:
Initial Investigation The first work carried out is related to an initial investigation on the topics dealt with by the auctus team and specifically in the investigation in which I contributed.
[Read More]
A propos du centre ou de la direction fonctionnelle Le centre Inria Bordeaux - Sud-Ouest est un des neuf centres d’Inria et compte une vingtaine d’équipes de recherche. Le centre Inria est un acteur majeur et reconnu dans le domaine des sciences numériques. Il est au cœur d’un riche écosystème de R&D et d’innovation : PME fortement innovantes, grands groupes industriels, pôles de compétitivité, acteurs de la recherche et de l’enseignement supérieur, laboratoires d’excellence, institut de recherche technologique…
[Read More]
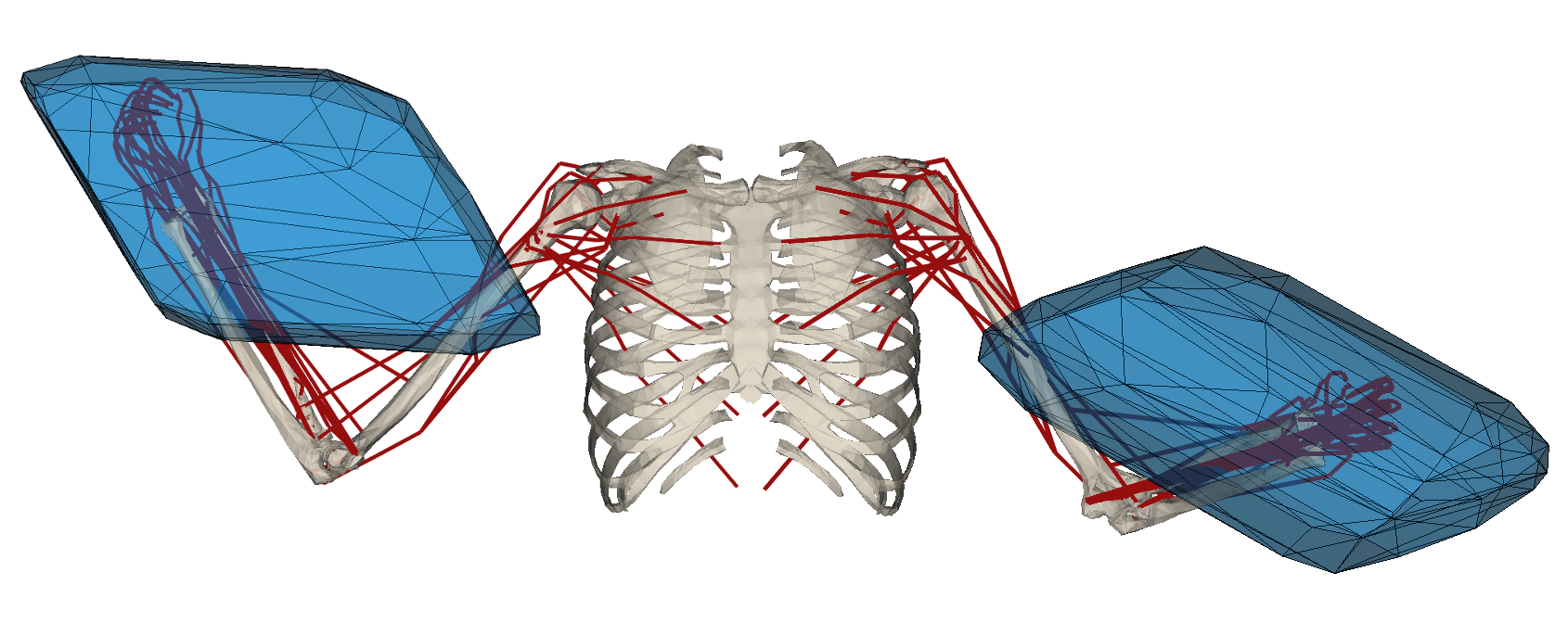
Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$
This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models. In this paper the method overview is given as well as the verified on the assistive robotics scenario.
[Read More]