The SHAARE associate team is created in 2024 between the IRiS lab at KAIST and the Auctus team at Inria, to share our complementary methodological orientations in haptic shared control. Together, we aim at developing shared-control approaches that, either, better guide the human through adaptive haptic guidance, or adjust the robot behavior according to the human gestures.
The IRiS lab develops virtual-fixture feedback, generated from a task description given by the user.
[Read More]
Context This internship is part of a research project on haptic guidance. Haptic guidance provides force feedback to help an operator to remotely operate a robot thanks to a haptic interface. The purpose of these forces is to induce a certain behavior of the robot with respect to the task, such as following a reference trajectory or applying a precise interaction force. The advantage of using such guidance methods is to relieve the user’s cognitive workload during the teleoperation through proper assistance, while allowing him to control the task.
[Read More]
The Auctus team was asked to perform a demonstration of our work during the Village Sports & Science in Bordeaux. We used the same demonstration that we did during the robotcup to over 2300 visitors.
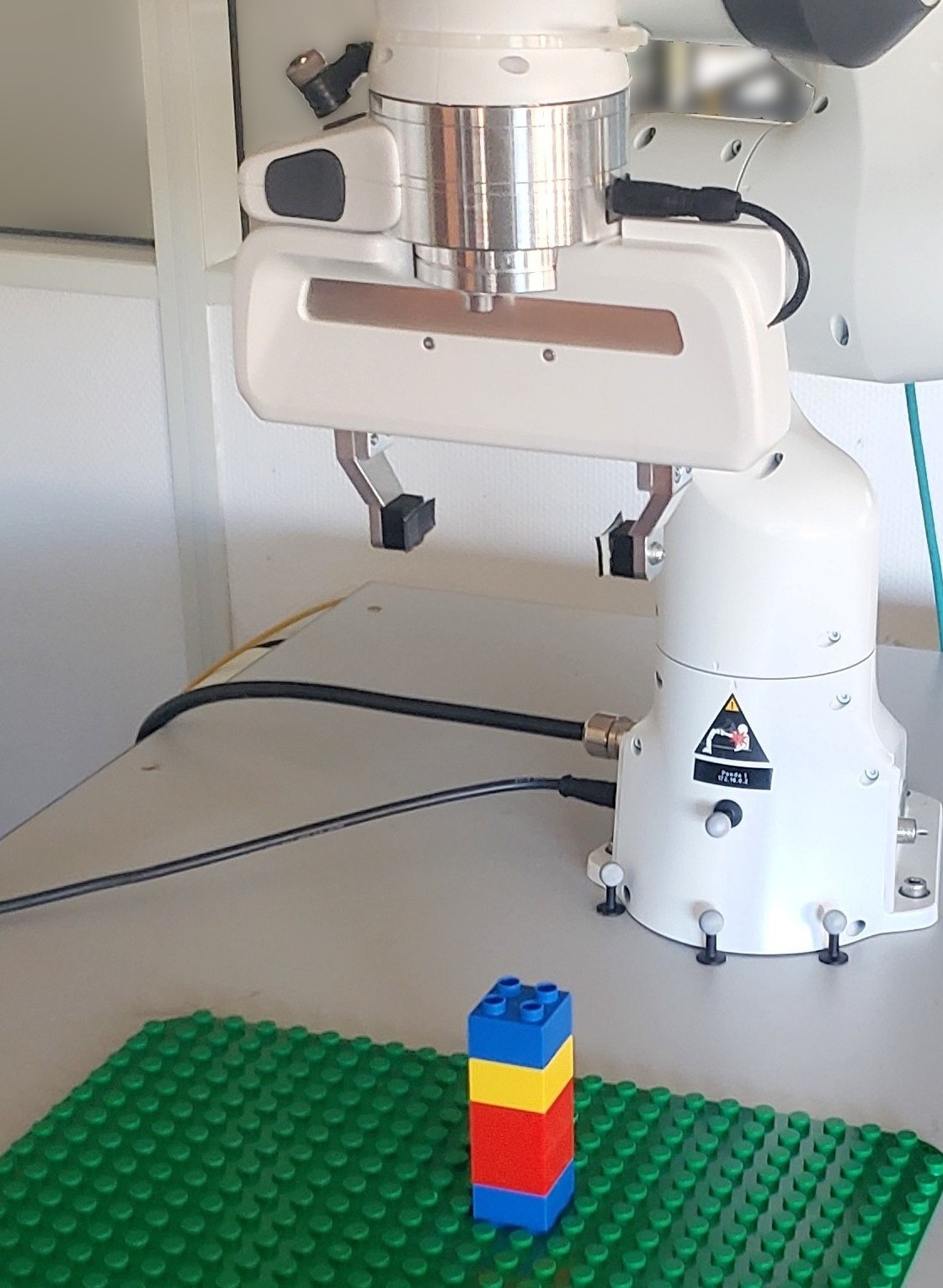
The aim of this project is to use pieces of softwares developed at Auctus to manipulate LEGO. This work can be related to experiments for Benjamin Camblor’s thesis and the PacBot project.
Live demonstration Here is a video of a manipulation demo. The robot realizes three tasks:
Remove a single LEGO on a tower Put LEGO on the plate Put LEGO on another LEGO All this work is done using the softwares developed at Auctus, namely :
[Read More]

Me I am a PhD student carrying out a thesis resulting from a collaboration between Farm3 company, the RoBioSS team from Institut Pprime and the AUCTUS team.
I began my PhD in the AUCTUS team in June 2022, before that, I had been working as an engineer for 2 months, setting up an experiment for Benjamin Camblor’s thesis. Back then I was freshly graduated from the engineering school Télécom Physique Strasbourg.
[Read More]
People involved:
 Farm3 develops a robotic and ultrasound-based farm for vertical off-ground cultivation: The Cube. Supported by French starred chefs, the company aims at countering intensive farming by locally producing nutritive and tasty veggies and herbs, without pesticides nor GMOs, and in respect of the environment. Such novel ultraponic farming, inside a closed and controlled space, fosters local and quality cultivation of various species. The ultrasound-based technique maintains an optimal level of oxygenation and provides the needed amount of water and nutriments to the plants. The plants must be confined in this ideal growth atmosphere until they are ripe. However, some actions must be done while growing or harvesting the plants, such as clearing up the seedling, removing bad leaves, or pollinating the flowers. A robotic arm, equipped with a dedicated gripper, has been designed to perform these actions inside the Cube. To preserve the expertise of the farmer in the cultivation process, these skilled actions will be remotely controlled through a teleoperation device. Through a collaboration with the AUCTUS team, at INRIA Bordeaux, and the RoBioSS team at Pprime Institute, Farm3 aims at smartly robotizating the Cube, to enhance the cultivation conditions while facilitating the remote control of the farm. The first challenge of this project is to set up the dedicated robotic manipulator inside the Cube to autonomously perform simple tasks, such as grasping and placing plant buckets on the cultivation grid. The second objective is to preserve the farmers’ expertise as they should be able to control the actions through a Human-Robot interface. To remotely perform the task, the teleoperation interface should be augmented with relevant visual and haptic information, related to the plants and the Cube.
Farm3 develops a robotic and ultrasound-based farm for vertical off-ground cultivation: The Cube. Supported by French starred chefs, the company aims at countering intensive farming by locally producing nutritive and tasty veggies and herbs, without pesticides nor GMOs, and in respect of the environment. Such novel ultraponic farming, inside a closed and controlled space, fosters local and quality cultivation of various species. The ultrasound-based technique maintains an optimal level of oxygenation and provides the needed amount of water and nutriments to the plants. The plants must be confined in this ideal growth atmosphere until they are ripe. However, some actions must be done while growing or harvesting the plants, such as clearing up the seedling, removing bad leaves, or pollinating the flowers. A robotic arm, equipped with a dedicated gripper, has been designed to perform these actions inside the Cube. To preserve the expertise of the farmer in the cultivation process, these skilled actions will be remotely controlled through a teleoperation device. Through a collaboration with the AUCTUS team, at INRIA Bordeaux, and the RoBioSS team at Pprime Institute, Farm3 aims at smartly robotizating the Cube, to enhance the cultivation conditions while facilitating the remote control of the farm. The first challenge of this project is to set up the dedicated robotic manipulator inside the Cube to autonomously perform simple tasks, such as grasping and placing plant buckets on the cultivation grid. The second objective is to preserve the farmers’ expertise as they should be able to control the actions through a Human-Robot interface. To remotely perform the task, the teleoperation interface should be augmented with relevant visual and haptic information, related to the plants and the Cube.
In 2022, a contract was signed with Farm3 for a PhD on assisting the human by transferring skills to the robot in teleoperated vertical agriculture. The PhD student is Alexis Boulay under the supervision of David Daney.
[Read More]