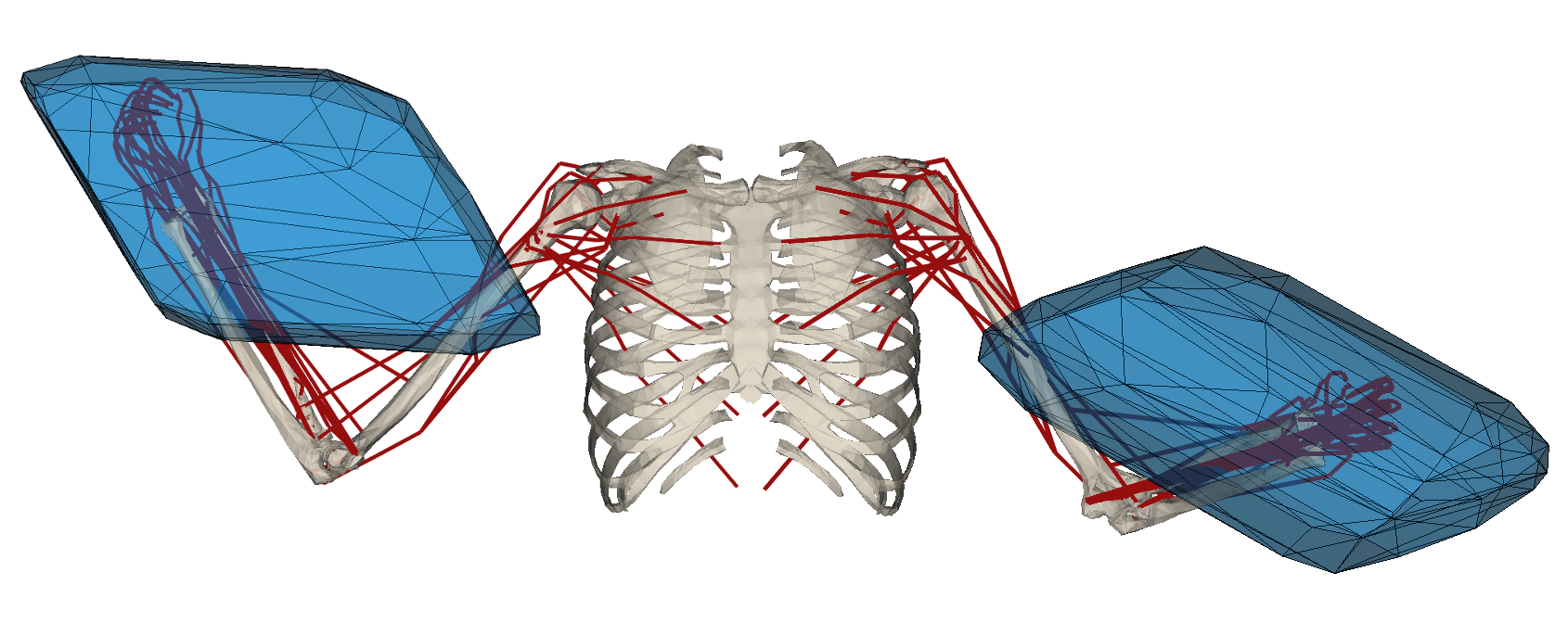
Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$
This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models. In this paper the method overview is given as well as the verified on the assistive robotics scenario.
[Read More]

The MOVER project is related to the study of morphological and motor variability of a human operator. Its goal is to develop tools for representing different operators with varying morphologies, mouvement amplitudes and motor variability for ergonomics purposes.
Motor variability : an appropriate level of motor variability can contribute to lower the incidence of musculoskeletal disorder of a human operator. In this framework, the aim of the project is to get a better insight into the motor variability of a human operator through different experimental protocols.
[Read More]

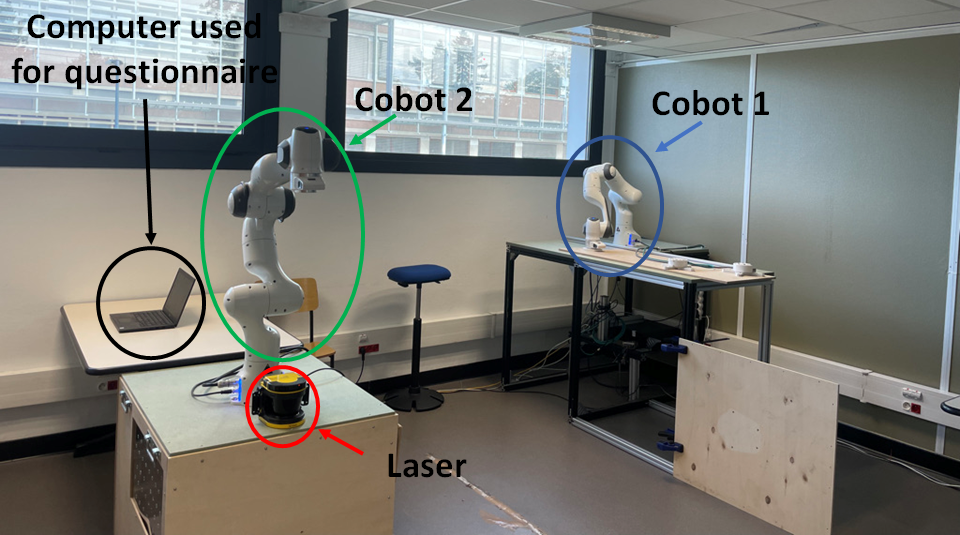
The PacBot project aims to design a semi-autonomous cobotic system for assistance, capable of selecting, synchronising and coordinating tasks distributed between the human and the robot by adapting to different types of variability in professional gestures, while anticipating dangerous situations.
The orchestration of tasks between the human and the robot is difficult because it must answer the question of the distribution of roles within the couple according to the physical and decision-making abilities and constraints as well as the consequences of their interactions.
[Read More]
Paper Abstract In this paper, the concept of signaling motions of a robot interacting with a human is presented. These motions consist in using the redundant degrees of freedom of a robot performing a task as new means of meaningful robot-human communication. They are generated through quasi-static torque control, in consistency with the main robot task. A double within-subject (N=16) study is conducted to evaluate the effects of two signaling motions on the performance of a task by participants and on their behavior towards the robot.
[Read More]