The internship supervised by Nasser Rezzoug, covered various topics related to robotics and biomechanics, focusing on the identification of the nature and amount of data required to customize the parameters of a musculoskeletal model according to the required precision. A brief summary of the topics discussed and the work carried out:
Initial Investigation
The first work carried out is related to an initial investigation on the topics dealt with by the auctus team and specifically in the investigation in which I contributed. That is why a series of papers were read to have a general knowledge about the research guidelines.
Visual Perception
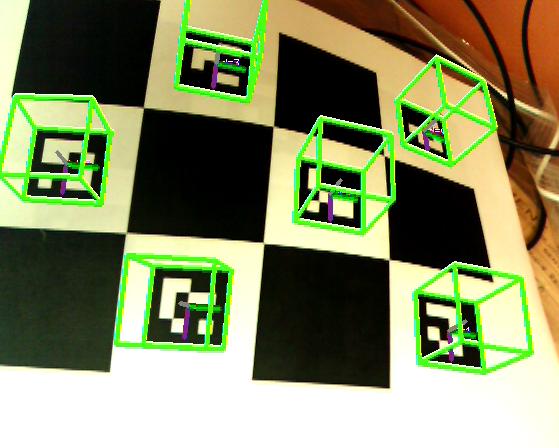
An approach to understand the work dealt with the creation of a tool to visualize the polytope force in real time on the person through the use of QR codes (ArUco codes) and artificial vision.
Visual Representation
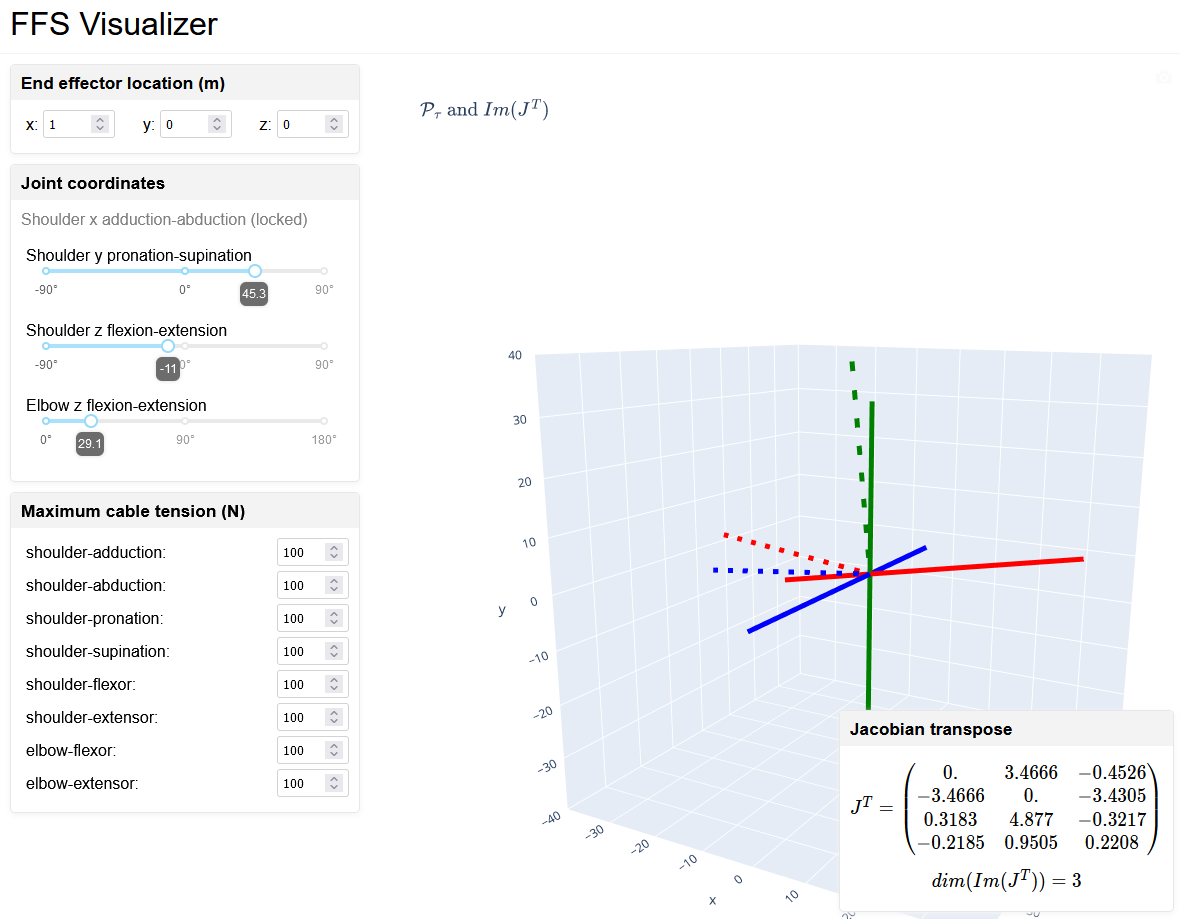
The essential work of the internship was the visual representation of the constituent elements of the force feasible set in an opensim model. This was done through various iterations obtaining the following result
State of the art research
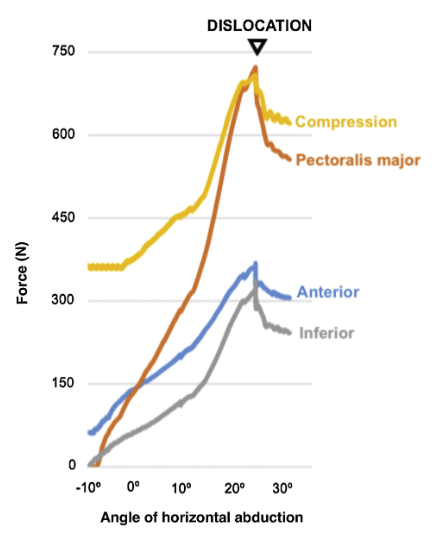
To validate the created model, a study was carried out on the literature related to shoulder dislocation and the configurations necessary for it to occur. The most interesting results are the following:
- Dislocation usually occurs when the pectoralis muscle load exceeds the compression of the glenohumeral muscle.
- Dislocations generally occur when the horizontal abduction angle is approximate 27°.
- At the time of dislocation, the magnitude of the force exerted by the pectoralis muscle was approximate 565 (other studies showed that it was approximate 609).
Integration Opensim with MatLab
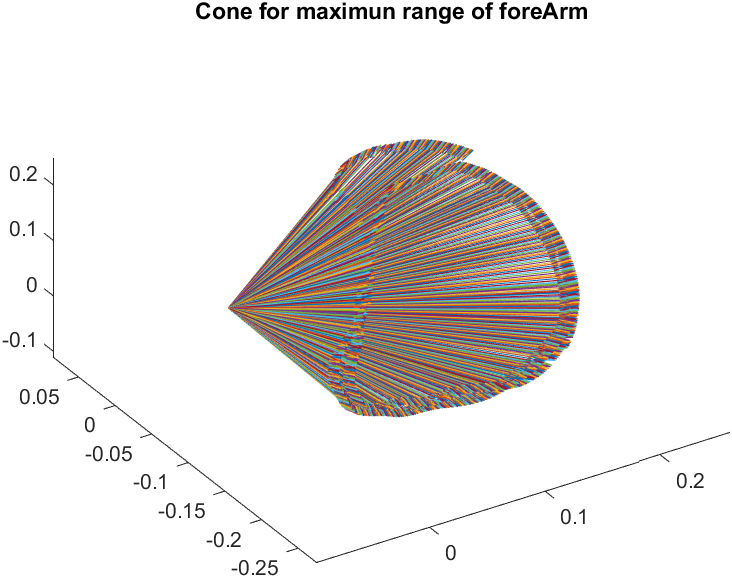
Directly related to the previous topic, a study of the range of movement of an arm was carried out through markers arranged in specific areas.
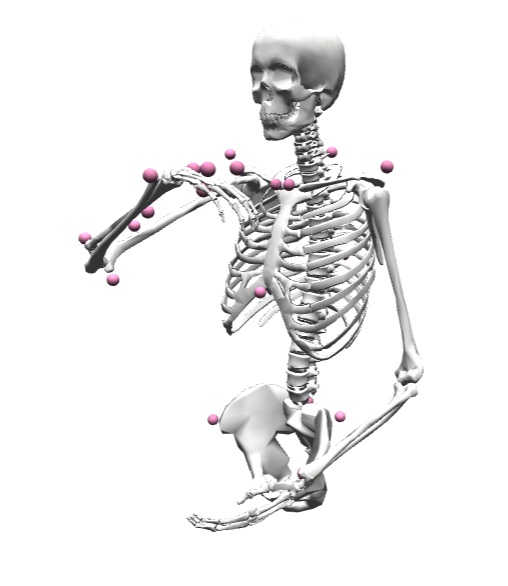
Data cleaning was done to these markers in order to be used in Opensim, scale the model to the person and use inverse kinematics to measure the range of motion of each joint. To finally obtain the cone that represents the range of motion