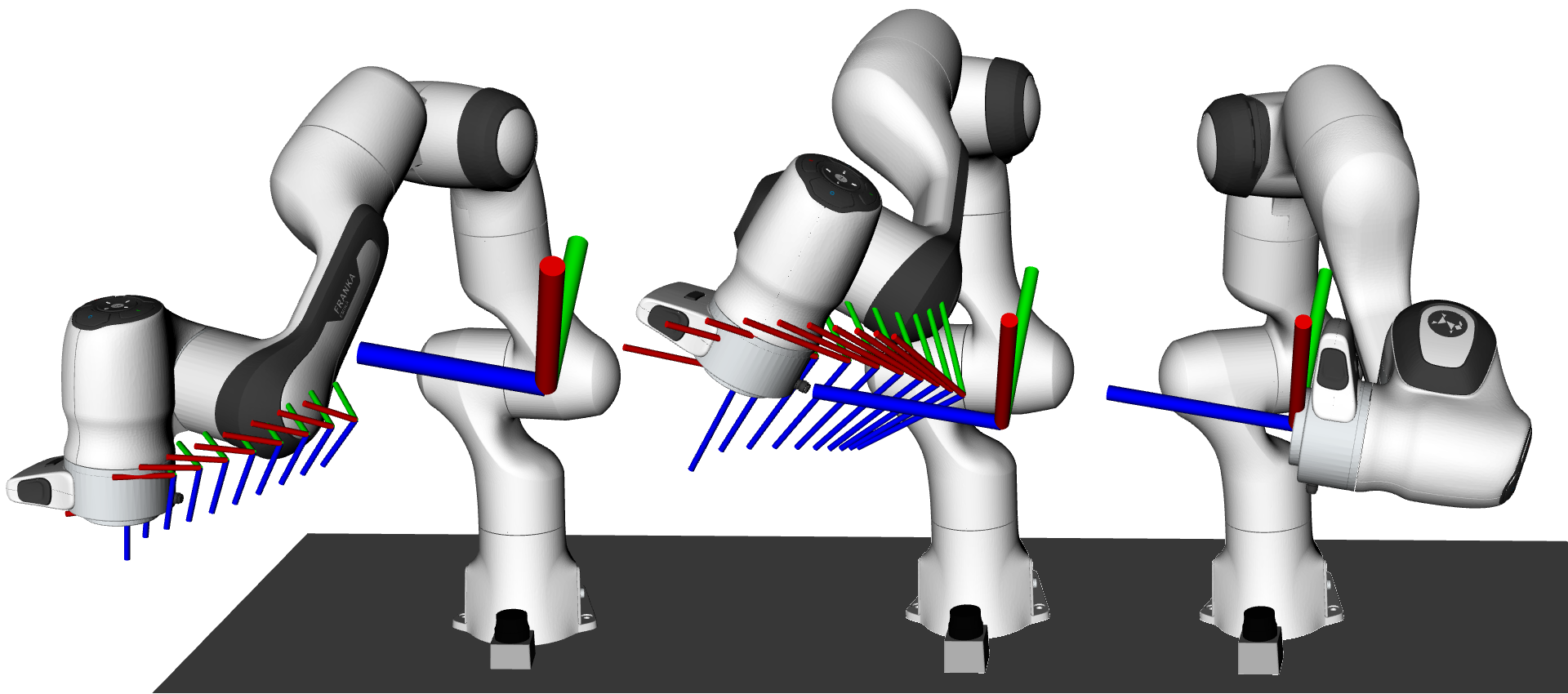
Abstract Collaborative robotics involves the transformation of industrial robots to function in shared workspaces alongside humans, resulting in more compact and manageable robotic systems. This evolution necessitates a reevaluation of the requirements for robot controllers. Safety remains paramount, but robots must also adapt to dynamic contexts where objects are in constant motion, and conditions are ever-changing as people carry out their tasks.
To address these challenges, this work proposes using Model Predictive Control (MPC) to empower the robot to dynamically adjust its operations in a responsive manner.
[Read More]
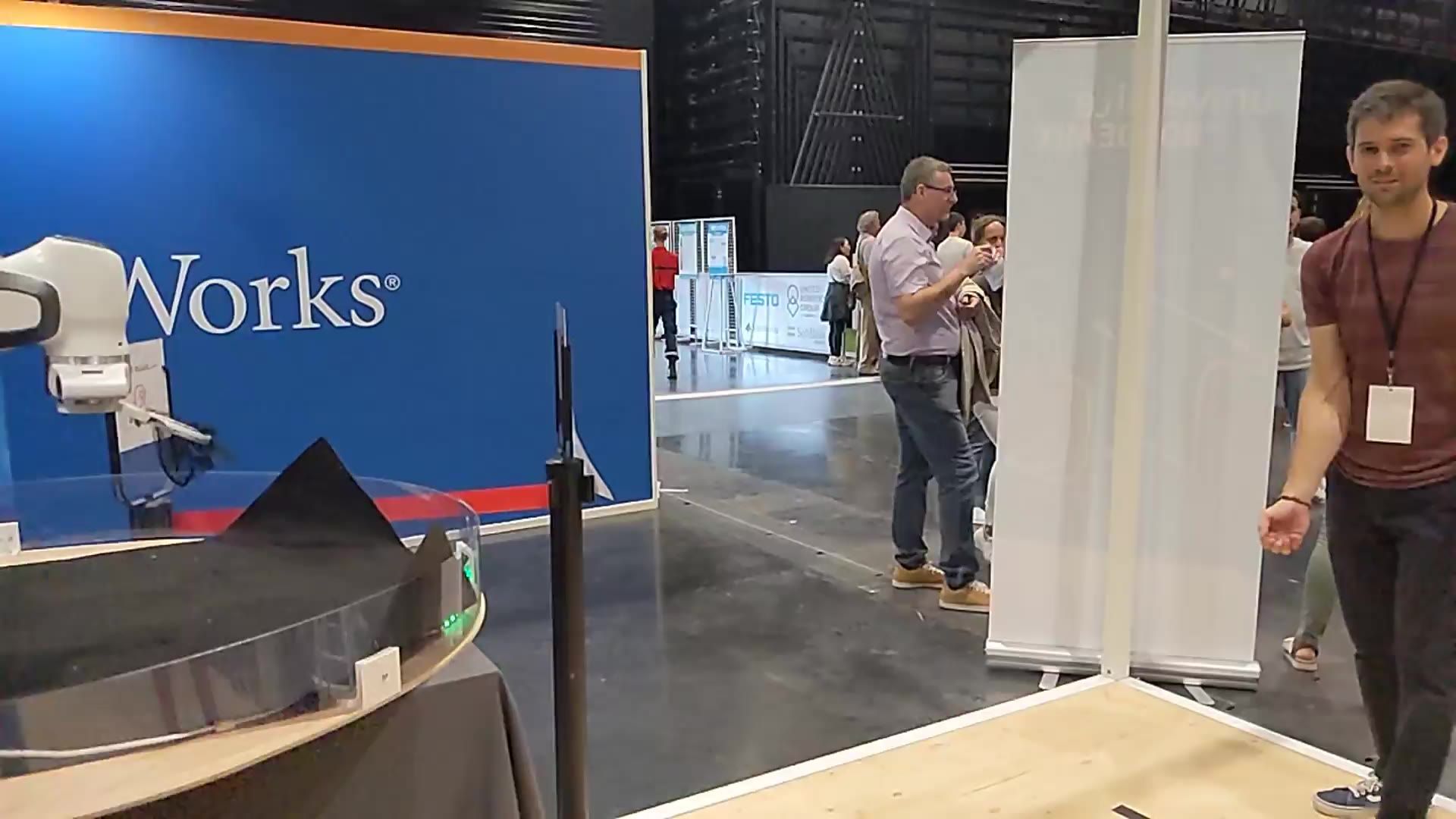
The Auctus team manned a demonstration stand at the robocup. We took advantage of this opportunity to test our MPC based algorithms in a playful experience.
Players were given small balls to throw into the large Plexiglas basket at the foot of the robot. The robot must prevent the marble from falling into the basket. To do this, he’s equipped with a tiny landing net.
Behind this seemingly simple game runs an algorithm to detect the ball’s landing point, as well as our real-time MPC algorithm to move the robot, taking full account of the robot’s capabilities.
[Read More]

Paper Abstract Robots require the ability to autonomously and continuously react to unexpected online changes in the task definition and in the environment, especially those cohabited with humans. To react to these changes, the task, from the current state up to the finish, must instantly be reconsidered. This implies a prohibitive re-computation cost.
This paper proposes a modular control architecture based on Model Predictive Control, that offers a good compromise between optimally achieving the task and the required computation time, by only reconsidering the near future.
[Read More]

Paper Abstract Efficient workspace sharing of collaborative robots and human operators remains an unsolved problem in the industry. This problem goes beyond the use of a priori or a posteriori safety measures and has to be tackled at the control level. To address the need of adaptation to human presence as well as to endow the robot with the ability to adapt interactively to new Cartesian targets, a linear Model Predictive Controller is proposed in this paper.
[Read More]
Stellantis is a multinational automotive manufacturing corporation formed in 2021 on the basis of a 50-50 cross-border merger between the Italian-American conglomerate Fiat Chrysler Automobiles and the French PSA Group. The principal activity of Stellantis is the design, development, manufacture and sale of automobiles.
[Read More]
Hi, here’s the project I’m currently working on.
You can also check out my github profile.
My publications This is list of my publications
Journal articles 24 documents Conference papers 24 documents Preprints 24 documents Thesis 24 documents Reports 24 documents Book chapters 24 documents Patents 24 documents Related topics #ntorres Nicolas Torres PhD thesis defense Predictive Control of Collaborative Robots in Dynamic Contexts Posted on October 23, 2023 | Auctus Abstract Collaborative robotics involves the transformation of industrial robots to function in shared workspaces alongside humans, resulting in more compact and manageable robotic systems.
[Read More]