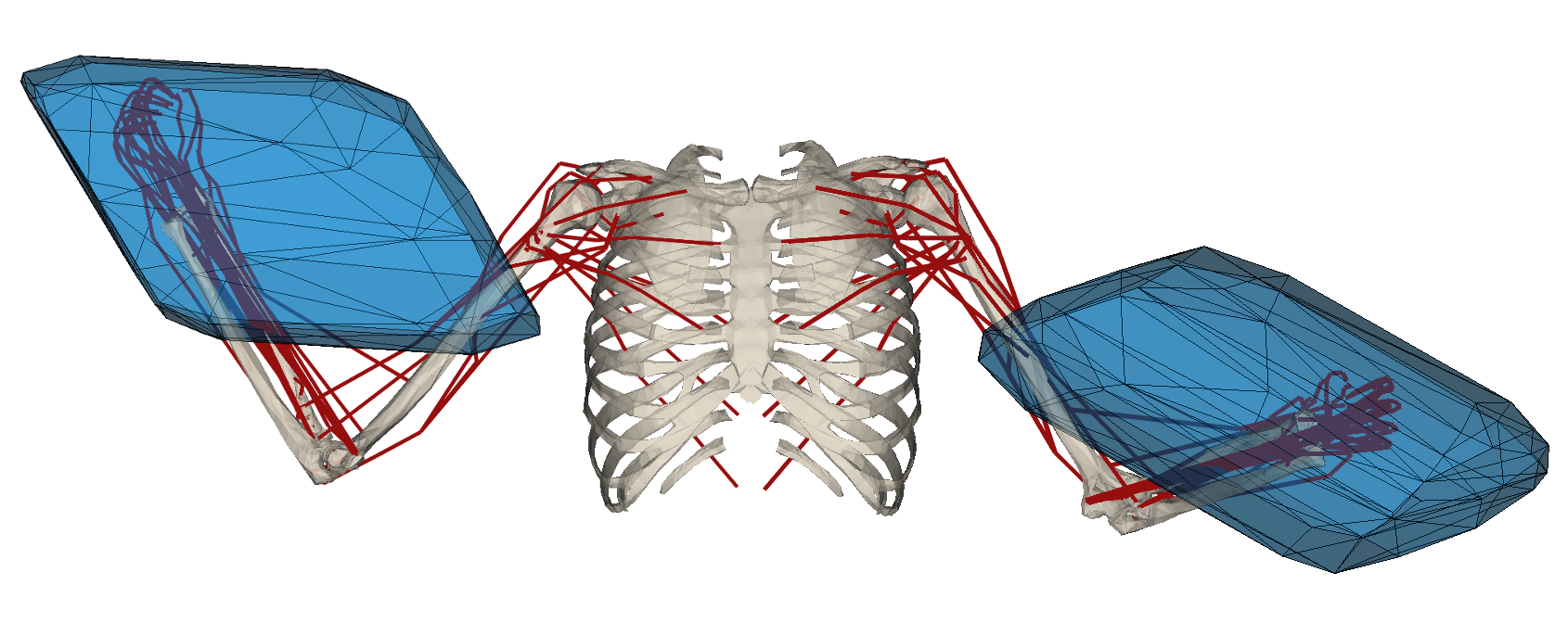
Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$
This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models. In this paper the method overview is given as well as the verified on the assistive robotics scenario.
[Read More]
Lieu du stage et encadrement Le stage sera effectué dans le cadre d’une collaboration entre l’équipe projet AUCTUS (INRIA Bordeaux Sud Ouest, Rezzoug Nasser) et le laboratoire PsyClé EA 3273 (Université Aix-Marseille, Brice Isableu). Le stage se déroulera dans les locaux du laboratoire PsyClé (Aix en Provence) sous la direction de Brice Isableu (PU, centre PsyClé) pour les aspects contrôle moteur et de Nasser Rezzoug (MCF HDR, équipe projet AUCTUS BSO) pour les aspects biomécaniques.
[Read More]

My publications This is list fo my publications
Journal articles 24 documents Conference papers 24 documents Preprints 24 documents Thesis 24 documents Reports 24 documents Book chapters 24 documents Patents 24 documents Related topics #nrezzoug An iterative Convex Hull Method On-line feasible wrench polytope evaluation based on human musculoskeletal models Posted on March 7, 2022 | Auctus Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$ This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models.
[Read More]