Reachable space of robotic manipulators has complex geometry and is often hard to characterise, therefore it is usually calculated in advance by the robot manufacturers and given as an image in their datasheets (as shown on the image on the right). However these images are hard to exploit as they are not analytical solutions to this problem. Even if we would have an analytical solution to this problem it would still not include in its consideration robot’s dynamics, its payload or its actuator torque limits.
[Read More]
Iterative convex hull is a polytope evaluation algorithm developed for the generic class of the linear algebra problems: $$ A\bm{x} = B\bm{y},\qquad \bm{y} \in [\bm{y} _{min}, \bm{y} _{max}] $$
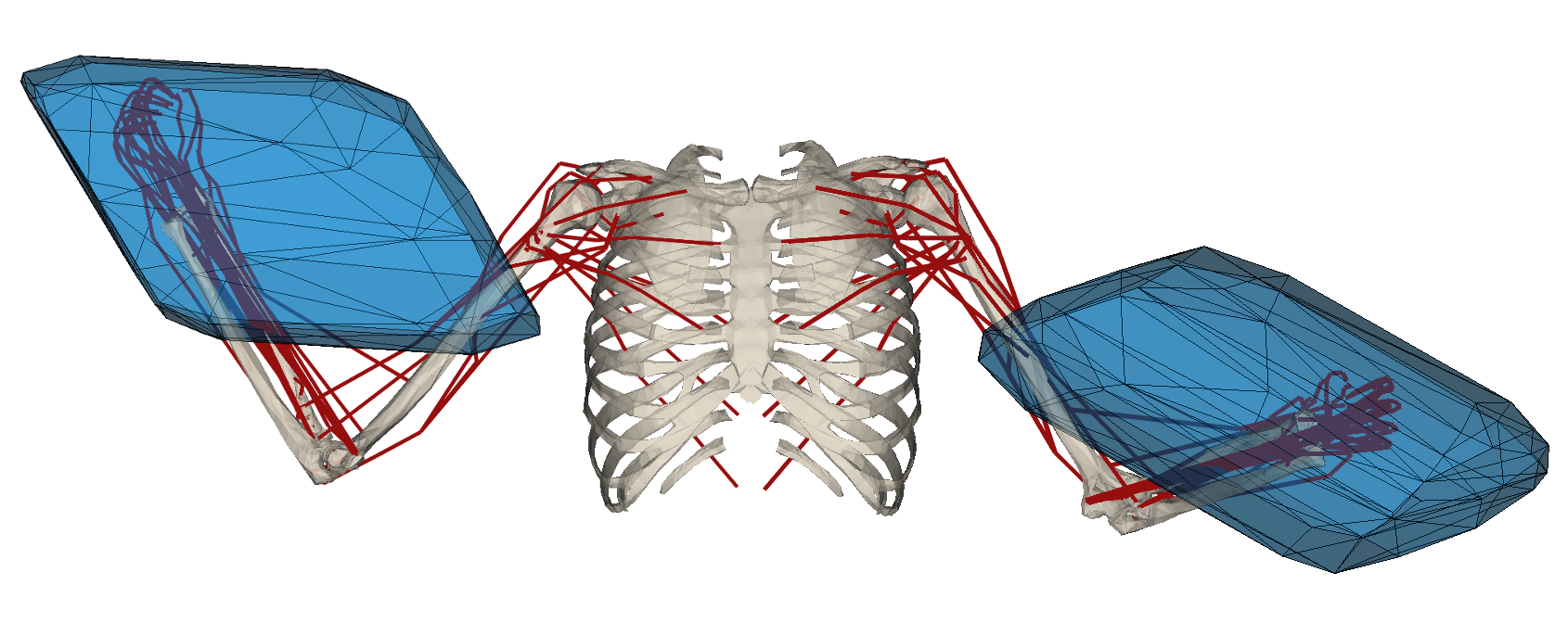
This type of problems can be found in many different domains, one of them being the wrench capacity analysis of the human musculoskeletal models. In this paper the method overview is given as well as the verified on the assistive robotics scenario.
[Read More]
The LiChIE project (funded by BPI) aims to design a constellation of mini-satellites for optical Earth observation. Among many other topics, this requires to rethink the way sattelites are being produced in order to ease this highly complex process. There is actually an unprecedented economical and societal demand for robots that can be used both as advanced and easily programmable tools for automatizing complex industrial operations in contexts where human expertise is a key factor to success and as assistive devices for alleviating the physical and cognitive stress induced by such industrial task.
[Read More]